For several weeks I’ve been flying a F550 hexacopter with a Pixhawk 2.4.8 running 4.0.5 with a GPS labeled Ublox 7M. Flight has been stable although there have been a few crashes due to human error. The last couple of days after stabilizing with a HDOP of < 1, at least 6 satellites and good EKF the craft transitions from a good loiter to jerky movement and GPS glitches occur in flight for about 30 seconds until cleared. After several power cycles and error persisting I changed the battery, achieved good loiter and flew a 4 minute long auto mission with no issues. I then swapped in another battery and experienced GPS glitch errors again - specifically I see GPS-2 and GPS-0 errors in the log.
I did some tests with the unit on the ground. I only spun the props (ARMed and DISARMed) and let it sit there for 5 minutes or so during which time it experienced GPS glitches. My most recent crash was several days ago and logs before the event don’t show any GPS glitches, so I guess the crash could have caused the issue, but don’t know how or what since when not glitching everything works fine.
Two logs (1 and 2) attached stationary and in flight. Both contain GPS glitches. Any thoughts appreciated!
I had a look to your second log and I can see is that you have very low GPS satellites (5-7), and your HDOP is very high (about 1.77), and should be under 1. Indeed that is the main problem, the quality of your GPS signal is very poor so it is normal that you have GPS glitches.
I don’t know if you are fliying in a place where the gps signal is very weak or you have cables, a companion computer or USB port near to the GPS that is inducing noise.
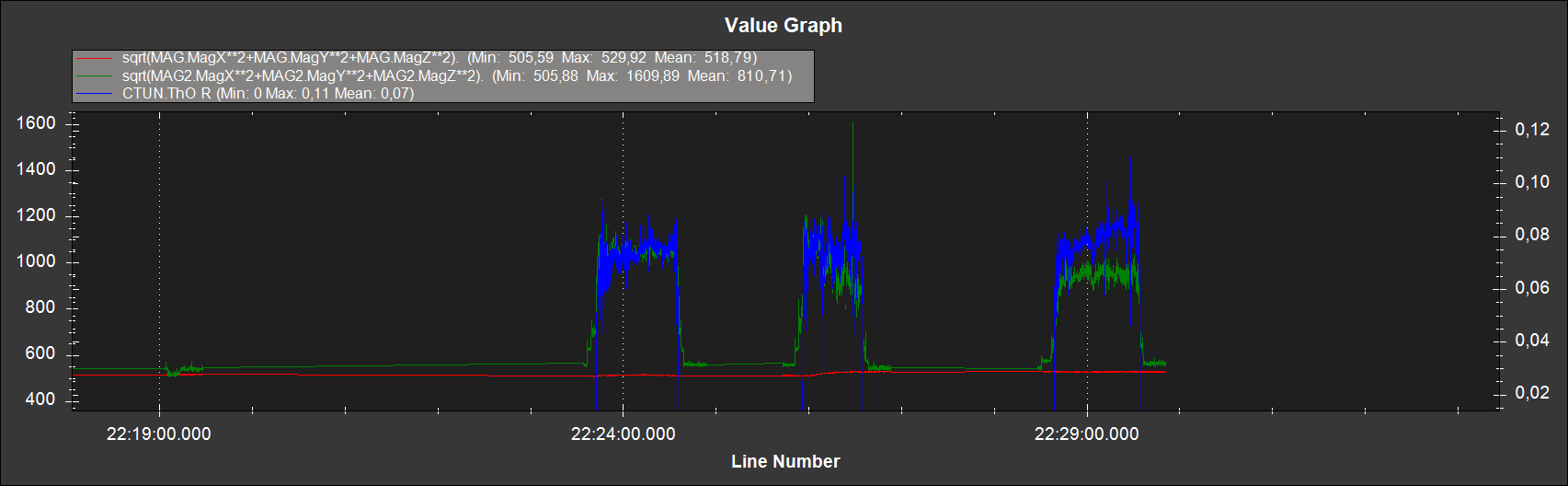
Also you have a lot of interference on your second compass, it is dependable of the throttle so it is caused by power cables very close to it.
I’m definitely seeing lots of glitches when my satellite count is 7 or 6 and drops one, even though EKF remains good. There are lots of trees and houses where I’m flying. Climbing above the trees before going AUTO helps quite a bit with this issue.
As for the noise, I have my GPS mounted ~10" above everything except battery, which is ~8" away (pic attached.) My 1st compass in co-located with GPS, my second is in the Pixhawk. I have power wires running right by the Pixhawk and a Pi Zero W mounted underneath it (separated by PCB frame), so that is a likely source of noise. With that said, does it matter that second compass is seeing noise if first compass (primary) is being used or does Ardupilot use both?
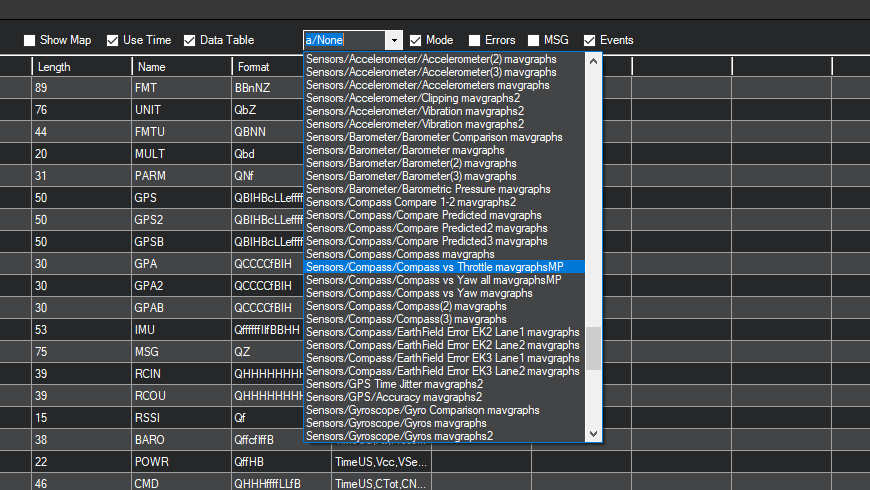
One last question - in your graph how did you get those compass measurements / calculations from the Data Flash log? I see mag_field in my Telemetry log under “CUSTOM”, but that doesn’t differentiae between first and second compasses.
I agree with @vosair, upgrade your GPS and you will notice the change.
Ardupilot can use both, it depends on your configuration. I would recommend you only to use the first compass in your case. But the best would be move away the power cables and use both compass.