Access is required in that link, fix that for help.
Sorry Dave,
Changed it now. Here‘s the link again
https://drive.google.com/drive/folders/14CBDkRAHiizLnv4sp-DbDNVz2rgmY5Ge
Cheers Konrad
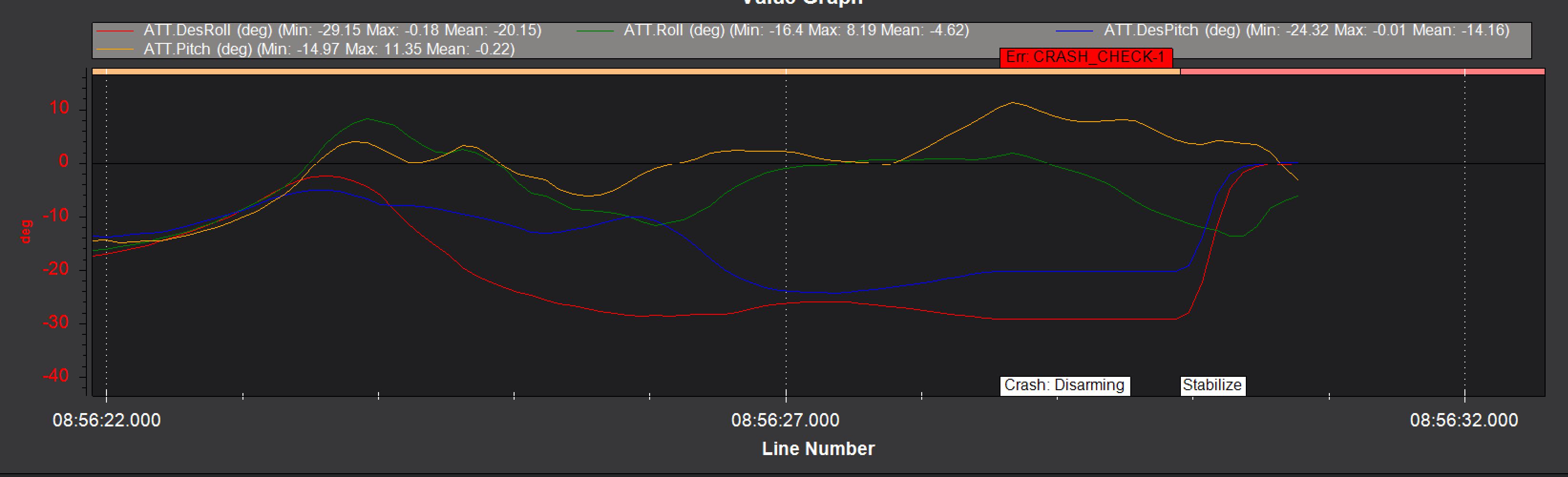
So far all I can see is that just prior to the crash the desired pitch/rolls start to deviate a lot from actuals. With it being in RTL then that isn’t down to pilot inputs thats for sure. Gusts? Flight controller coming loose (I doubt it but you never know)?
Thanks Angus,
yeah it was pretty gusty…could be the reason…
The copter has 18 inch props and I think if maybe the sinkrate was too high during landing as it needs to slow down the props quite a lot. It has a thrust-weight of 3.5:1. So that could have been the problem with gusty wind.
The thing I don’t understand is that if you see the description of the crash detection (https://ardupilot.org/copter/docs/crash_check.html) it says that there are differnet things which will be checked. And it tells that one of the checks is the acceleration of the copter. But my copter was still descending.
As @Carapau suggested Crash Detection was triggered from Pitch vs Desired Pitch of >30° ~8:56:28
Your MOT_THST_HOVER value is lower than MOT_SPIN_MIN. This can be trouble. Perhaps take another look at setting the Motor range Wiki:
https://ardupilot.org/copter/docs/set-motor-range.html
Or add weight with a bigger battery!
Thanks Dave,
but is it not cruitial to have nearly no acceleration to activate crash detection? I won’t do those tests again during gusty wind that’s for sure! Will cost me at least 500€ to repair. Bottom centerplate broken, two arms broken, Gimbal controlling board (Alexmos) bent, but will propably still work.
Thank you all for your help!
I will repair it and try it with the RM3100 compass+Inspire 1 GPS. I will report how things worked!