Hello ppl,
I have been encountering problem when i’m calibrating accelerometer. I’m using qgroundcontrol for accelerometer calibration. When I just enter calibration mode the error messages start popping up stating GPS Glitching, GPS Glitch cleared. Below is the error messages copied from qgroundcontrol.
“”"
[11:09:48.334] Info: ArduCopter V4.1.5 (1002fd6e)
[11:09:48.334] Info: ChibiOS: 45395b6a
[11:09:48.334] Info: fmuv3 003C0029 51305005 2037324B
[11:09:48.334] Info: RCOut: Initialising
[11:09:48.335] Info: Frame: QUAD/X
[11:09:49.837] Info: Calibrating barometer
[11:09:51.159] Info: Initialising ArduPilot
[11:09:51.378] Info: Barometer 1 calibration complete
[11:09:52.336] Info: ArduPilot Ready
[11:09:52.337] Info: AHRS: DCM active
[11:09:52.338] Info: RCOut: PWM:1-12
[11:09:53.306] Info: EKF3 IMU0 buffs IMU=9 OBS=4 OF=8 EN:8 dt=0.0120
[11:09:54.334] Info: EKF3 IMU0 initialised
[11:09:54.334] Info: AHRS: EKF3 active
[11:09:55.678] Info: EKF3 IMU0 tilt alignment complete
[11:09:55.731] Info: EKF3 IMU0 MAG0 initial yaw alignment complete
[11:09:58.382] Info: GPS 1: detected as u-blox at 230400 baud
[11:10:07.396] Critical: PreArm: Bad GPS Position
[11:10:07.403] Critical: PreArm: Fence requires position
[11:10:08.778] Info: EKF3 IMU0 origin set
[11:10:09.693] Info: Initialising ArduPilot
[11:10:10.234] Info: Place vehicle level and press any key.
[11:10:10.979] Info: EKF3 IMU0 is using GPS
[11:10:12.513] Info: GPS: u-blox 1 saving config
[11:10:13.833] Critical: GPS Glitch
[11:10:14.447] Info: u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
[11:10:21.010] Info: Place vehicle on its LEFT side and press any key.
[11:10:24.651] Critical: GPS Glitch cleared
[11:10:29.879] Info: Place vehicle on its RIGHT side and press any key.
[11:10:35.058] Critical: GPS Glitch
[11:10:38.020] Critical: PreArm: GPS glitching
[11:10:46.157] Critical: GPS Glitch cleared
[11:10:48.435] Critical: GPS Glitch
[11:10:49.438] Critical: EKF variance
[11:10:51.423] Info: Place vehicle nose DOWN and press any key.
[11:11:08.019] Critical: PreArm: GPS glitching
[11:11:08.884] Critical: GPS Glitch cleared
[11:11:11.874] Critical: GPS Glitch
[11:11:23.240] Critical: GPS Glitch cleared
[11:11:26.487] Info: Place vehicle nose UP and press any key.
[11:11:34.485] Critical: GPS Glitch
[11:11:38.132] Critical: PreArm: DCM Roll/Pitch inconsistent by 10 deg
[11:11:38.137] Critical: PreArm: Compasses inconsistent
[11:11:38.142] Critical: PreArm: GPS glitching
[11:11:39.537] Info: Place vehicle on its BACK and press any key.
[11:11:45.456] Critical: GPS Glitch cleared
[11:11:49.558] Critical: GPS Glitch
[11:12:00.238] Critical: GPS Glitch cleared
[11:12:05.456] Critical: GPS Glitch
[11:12:08.025] Critical: PreArm: GPS glitching
[11:12:16.118] Critical: GPS Glitch cleared
[11:12:21.309] Critical: GPS Glitch
[11:12:32.553] Critical: GPS Glitch cleared
[11:12:38.068] Critical: PreArm: EKF velocity variance
[11:12:48.650] Critical: GPS Glitch cleared
[11:12:54.513] Critical: GPS Glitch
[11:13:05.163] Critical: GPS Glitch cleared
[11:13:11.044] Critical: GPS Glitch
[11:09:48.334] Info: ArduCopter V4.1.5 (1002fd6e)
[11:09:48.334] Info: ChibiOS: 45395b6a
[11:09:48.334] Info: fmuv3 003C0029 51305005 2037324B
[11:09:48.334] Info: RCOut: Initialising
[11:09:48.335] Info: Frame: QUAD/X
[11:09:49.837] Info: Calibrating barometer
[11:09:51.159] Info: Initialising ArduPilot
[11:09:51.378] Info: Barometer 1 calibration complete
[11:09:52.336] Info: ArduPilot Ready
[11:09:52.337] Info: AHRS: DCM active
[11:09:52.338] Info: RCOut: PWM:1-12
[11:09:53.306] Info: EKF3 IMU0 buffs IMU=9 OBS=4 OF=8 EN:8 dt=0.0120
[11:09:54.334] Info: EKF3 IMU0 initialised
[11:09:54.334] Info: AHRS: EKF3 active
[11:09:55.678] Info: EKF3 IMU0 tilt alignment complete
[11:09:55.731] Info: EKF3 IMU0 MAG0 initial yaw alignment complete
[11:09:58.382] Info: GPS 1: detected as u-blox at 230400 baud
[11:10:07.396] Critical: PreArm: Bad GPS Position
[11:10:07.403] Critical: PreArm: Fence requires position
[11:10:08.778] Info: EKF3 IMU0 origin set
[11:10:09.693] Info: Initialising ArduPilot
[11:10:10.234] Info: Place vehicle level and press any key.
[11:10:10.979] Info: EKF3 IMU0 is using GPS
[11:10:12.513] Info: GPS: u-blox 1 saving config
[11:10:13.833] Critical: GPS Glitch
[11:10:14.447] Info: u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
[11:10:21.010] Info: Place vehicle on its LEFT side and press any key.
[11:10:24.651] Critical: GPS Glitch cleared
[11:10:29.879] Info: Place vehicle on its RIGHT side and press any key.
[11:10:35.058] Critical: GPS Glitch
[11:10:38.020] Critical: PreArm: GPS glitching
[11:10:46.157] Critical: GPS Glitch cleared
[11:10:48.435] Critical: GPS Glitch
[11:10:49.438] Critical: EKF variance
[11:10:51.423] Info: Place vehicle nose DOWN and press any key.
[11:11:08.019] Critical: PreArm: GPS glitching
[11:11:08.884] Critical: GPS Glitch cleared
[11:11:11.874] Critical: GPS Glitch
[11:11:23.240] Critical: GPS Glitch cleared
[11:11:26.487] Info: Place vehicle nose UP and press any key.
[11:11:34.485] Critical: GPS Glitch
[11:11:38.132] Critical: PreArm: DCM Roll/Pitch inconsistent by 10 deg
[11:11:38.137] Critical: PreArm: Compasses inconsistent
[11:11:38.142] Critical: PreArm: GPS glitching
[11:11:39.537] Info: Place vehicle on its BACK and press any key.
[11:11:45.456] Critical: GPS Glitch cleared
[11:11:49.558] Critical: GPS Glitch
[11:12:00.238] Critical: GPS Glitch cleared
[11:12:05.456] Critical: GPS Glitch
[11:12:08.025] Critical: PreArm: GPS glitching
[11:12:16.118] Critical: GPS Glitch cleared
[11:12:21.309] Critical: GPS Glitch
[11:12:32.553] Critical: GPS Glitch cleared
[11:12:38.068] Critical: PreArm: EKF velocity variance
[11:12:48.650] Critical: GPS Glitch cleared
[11:12:54.513] Critical: GPS Glitch
[11:13:05.163] Critical: GPS Glitch cleared
[11:13:11.044] Critical: GPS Glitch
“”"
I even tried changing GPS but still got same error. But the compasses i have used with this Pixhawk are working perfectly fine with other Pixhawks. This problem has been occurred I can’t afford to update the firmware to latest as the surrounding environment (Companion computer and other electronics) should also be updated and that will take unnecessary time. It would be preferable to sort the problem in this version itself. Here is the link for the log files.
GPS glitches during accelerometer calibration can be ignored. Just don’t ignore them during compass calibration
And do not post in ArduCopter 4.0 when you are using 4.1
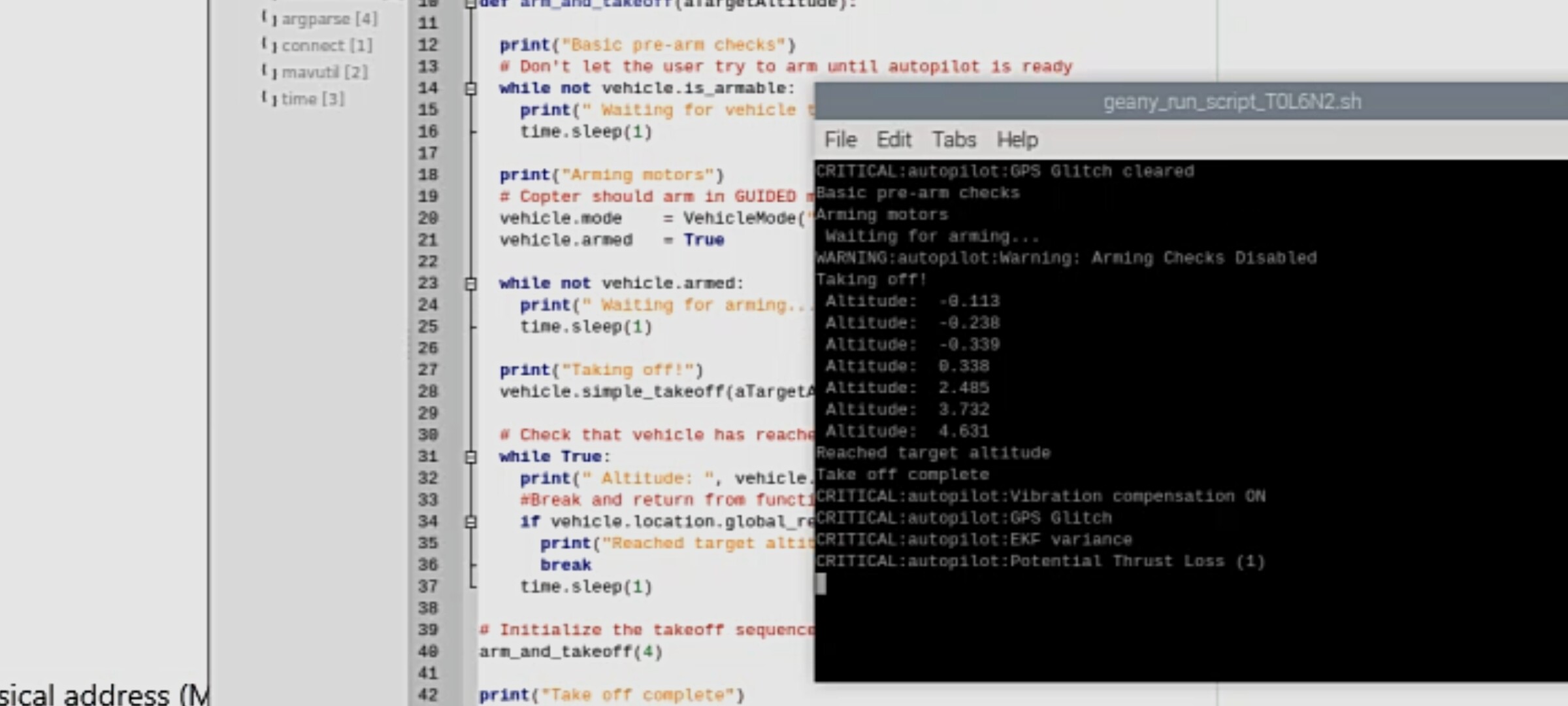
Hi mate. In my case, the “Critical: GPS Glitch cleared” message appearing when my copter is flying (running a dronekit script from companion computer). What does that mean or indicate? Thanks in advance!
It means you had a weak GNSS signal and now it improved
Thanks for the answer, mate. There’s a bit more, if you don’t mind. The mission i wrote in the script was to take off the copter, hover several seconds, and land. The result was the vehicle flew away a bit when hovering (i used time.sleep(15) to make it hover), though it was supposed to just land on where it took off. When finished, i checked on the console, and there appearing some more messages, those are this time “CRITICAL: autopilot: GPS Glitch” and “CRITICAL: autopilot: EKF variance”. Was that copter flying away because of those messages?
Yes, that is a sign that something is wrong.
Check the getting the hardware right section 1.1 of the Methodic Configurator blog post. And solve some of the issues.
Thanks again. Is high temperature environment one that can cause GNSS problems? Cause i ran the copter at blazing hot weather
Nope just interference, multipath or weak signal. Too many GNSS constellations are also bad in some receivers.
But all this information is contained in the methodic configuration software and associated Blog post.
Use the software and read the docs
Thanks for the help, mate. God bless you