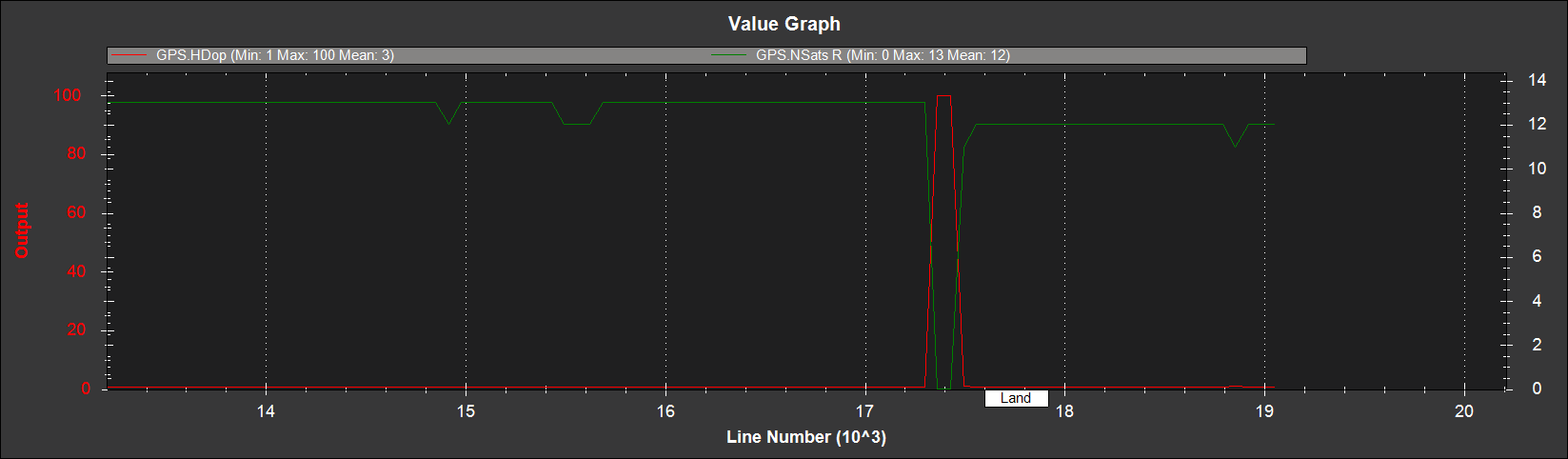
I uploaded Copter 3.4.4 to my Hex and test flew it this morning. I had two GPS dropouts that led to a short fly away where I switched to land quickly and landed safely. I noticed that there was a K-Index of 4 this morning so maybe that contributed. I haven’t seen a complete outage of satellites before. Not sure if it is a 3.4.4 problem or related to a geomagnetic storm.
I tested with a planetary k-index=1 this morning and didn’t see any GPS dropouts. I’ll continue to monitor the impact of k-index on GPS dropouts to see if there is a correlation or if the dropout is caused by something else.
Good to know. I flew again today for 10 minutes without any dropouts with K-Index=1. I’ll wait for a K-Index>=4 day to test again. I haven’t seen a K-Index=5 day yet.
The same happened with me a few days ago. I noticed the warning on my osd saying something like “no gps fix” and I froze… I switched to stabilize and back to loiter but didn’t noticed any strange behavior like flyaway.
I’ve been flying in this location a lot, difficult to say the reason. Didn’t know k-index prior to reading this. Will keep an eye on it.
I was only hovering 3 m when it drifted off target. If I had’ve been a much higher or waited a little longer, it looks like it regained fix pretty soon so it may have recovered OK. What was your copter doing when it lost lock?
I fly a regular routine mission around the local high school grounds to video construction progress for the school board. On 3 occasions so far, my craft has drifted off about 5m and correct. It was mentioned that it could be a GPS Doppler effect. Which makes sense in my case since there are a lot of buildings around.
But in addition to that, I really do not pay attention to the K index. I have flown several hours combined time in the 8-9 range with no issues.
That is not to say that the possibility of a major GPS outage is impossible during those times.
Wow, what date did you fly on? 8-9 is a rare occurrence.
Its possible that there is something else going wrong intermittently as well like the GPS communication hiccups for a second. The odd thing is that I haven’t seen a complete drop out before that impacted flight before this flight.
It was early last year. I had just completed my first autonomous mission in February 2016 and got into a discussion about it and was told by part of the group to look out for the solar weather and the other half said not to worry. Being into amateur radio as a kid, I wanted to know if the effect was real or not for GPS as it was for shortwave broadcasts. Just so happened that April we had a solar flare. I discharged a lot of batteries to try produce a geomagnetic glitch…nothing. Every mission flew perfectly.
But again, not saying it is impossible.
Wish I would have kept the log from the flight I described with the possible GPS Doppler.
That was an interesting flight path.
I flew for a total of 30 minutes this morning with a K-Index=1 with no issues. Waiting for another day with a K-Index>=4 to retest my initial observation.
I asked the guys on the UAV course I did last year if they ever encountered any problems with high KP index using their DJI gear.They could not think of a single occurence of interference or unexpected flight characteristics.I flew a while back during a rating of 7/8 ( didn’t notice until after the event in my UAV forecast page) and didn’t see anything in the logs, nor in the air.
Just odd that I had to two glitched flights in a row on the K=4 day and none on all subsequent days where K<= 2. Maybe it was just coincidence, but I’m still worried about the actual underlying problem.
Oh it’s worth pursuing.I’ve just never seen a glitch due to Kp activity and nor has anyone I’ve spoken to about it.I flew a couple of missions with automated landings and only discovered that it was during 7/8 Kp rating when I checked UAV forecast for next day’s conditions once I got home.It’s something I’ve always paid attention to due to the doom and gloom warnings but I’ve just never had an experience of misbehaviour due to it.Since that time I’ve ignored the Kp figure.
Wiring connection are a different matter.Oxidation of the contacts in the connectors is a real problem that’s been seen a few times and breakdown of cheap components is also a reality.I run a few cheapo M8Ns and have had the odd problem with one or two of them.I think I’ve got one with a dodgy compass currently.I’m looking at multiple GPS/compass set ups for the future.
I had this exact same issue yesterday, it briefly went from 20 sats to 8 then back to 18 on an M8N…it jusr drifted off course and got back on track within 3-4 seconds…I have never have this happened before in this setup over 1yr old…worried this might be some other underlying issue with 3.4.4 that I just loaded recently
kp index are not an exact science. But more importante is how uav forecast (or other website) get their data and the precision of those data. Normally, standard meteo forecast (and it is forecast, not exact science) get 50km precision, and are update slowly … So that could explain why you got a warning but don’t feel the effect.
Rob,
I had a quick look at the logs. It looks like the vehicle maybe moved 5m (maybe less)? I think that is probably within the minimum shift the glitch protection can handle. It’s possible we can do better by adding some of the logic they put into the Solo to detect glitches and switch the user into AltHold. I’ll have a chat with Paul Riseborough and we can put it on the to-do list.
At the risk of being a bit pedantic, I don’t think we should use the term “flyaway” for this situation (or even “short flyaway”). Let’s call it a “sudden position shift”…
Ah, by the way, I noticed in passing that two GPSs are connected. It’s not related to the position shift because it always kept using the first GPS (a Ublox M8?) but normally we don’t recommend two GPSs.
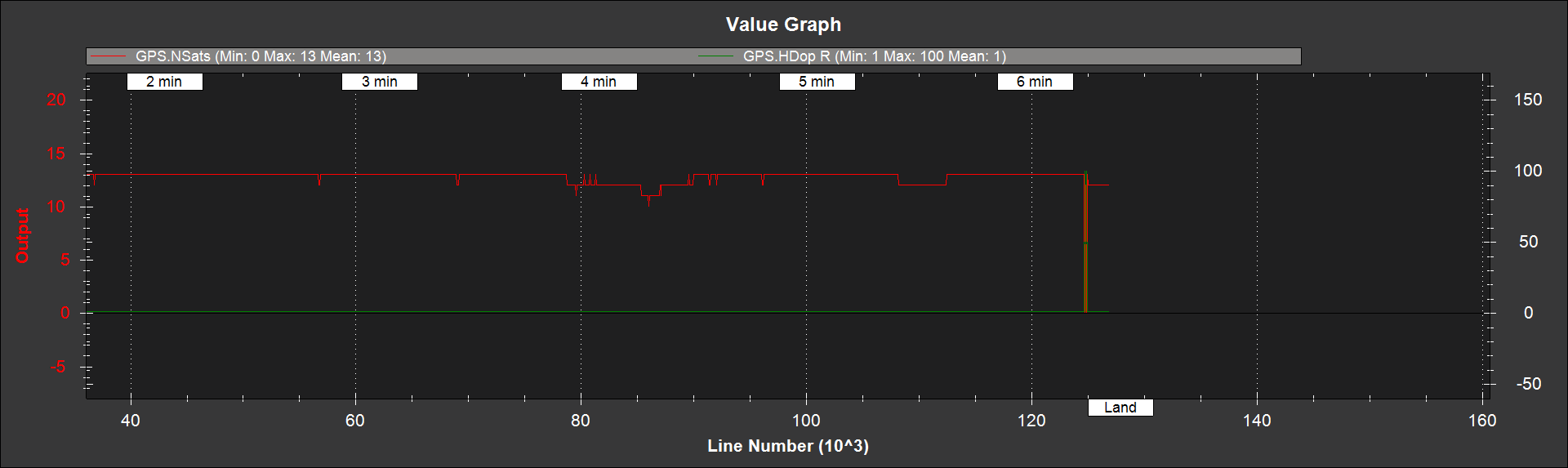
For those people into log analysis. When two GPSs are attached, both GPS and GPS2 messages appear in the logs. if GPS.U is “1” then the first GPS is being used. if GPS2.U is “1” then it’s the 2nd one. In this log, GPS.U stays as 1 throughout the whole flight.
One last thing, Paul is starting work on improving our multiple GPSs better in Copter. I think that will arrive in AC3.6.
I commanded Land as soon as I saw the copter flying off target so it could’ve flown further off target, hence the title. I haven’t seen the behavior for the last 10-15 10 minutes flights. Even today, the KP Index was 4 and I saw no glitches.
The second GPS is an RTK GPS. I’m only using it for reference right now and to get some flight experience with it. Its not being used for navigation yet. There are some bugs related to GPS switching that need to be fixed first such as this one:
After I get more experience with the RTK measurements, I’ll use it for Navigation.
It appears that Arducopter 3.5 has much better support with dual GPS configurations and RTK and improvements in barometric altitude calculations. I haven’t tested my copter with 3.5 yet.
(One thing I did to limit intermittent large lateral deviations during hovering, my use case, was to make these parameter changes:
1.) Reduce WPNAV_LOIT_SPEED to 50
2.) Reduce WPNAV_SPEED to 50
3.) Change GPS_NAVFILTER to 7 )