I had a crash a couple of weeks ago with my quadcopter (the firmware is V3.5.2). First, I thought it was just a faulty GPS unit, but looking at the Ardupilot docs, it says that my quad should’ve drift, waiting for me to regain control.
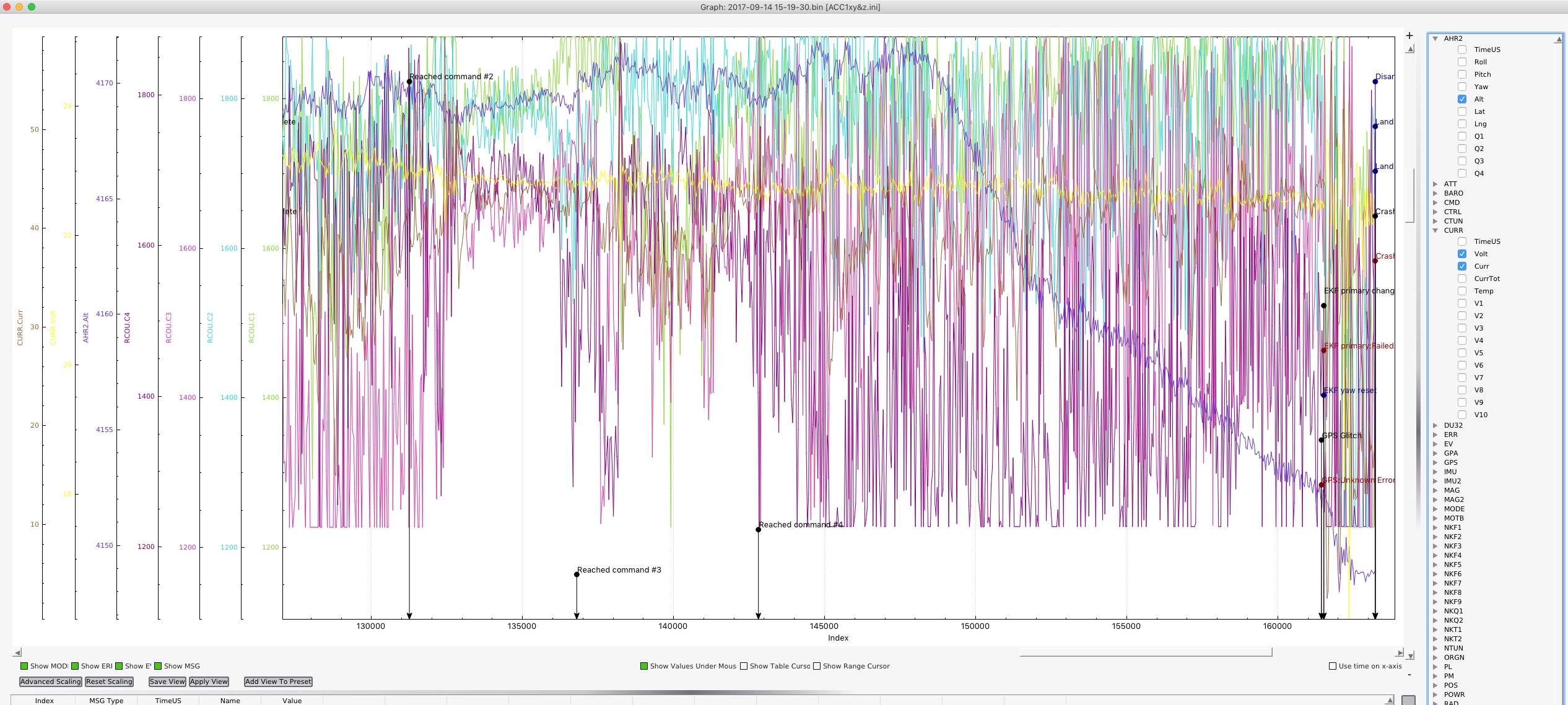
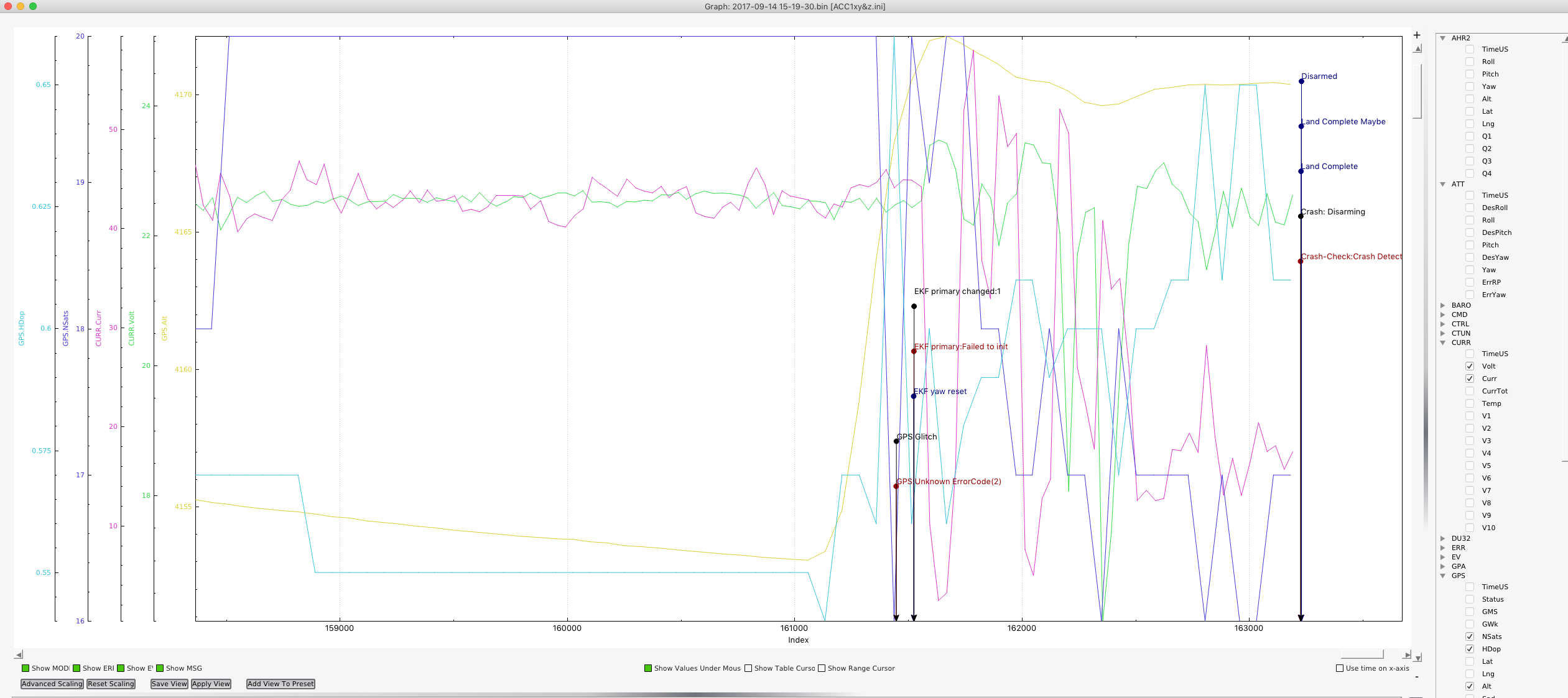
In my case, the copter was landing, and at around 2 m a GPS glitch appeared, followed by an EKF_PRIMARY-1 error. Then, the copter flip forward really quickly, it was impossible to react, and it crashed.
I have attached the bin file, any help would be appreciated. I don’t understand how a GPS glitch could make my copter crash out of a sudden.
I am more suprised it stayed in the air as long as it did.
You either have the copter out of balance or you were pushing a stiff breeze for starters.
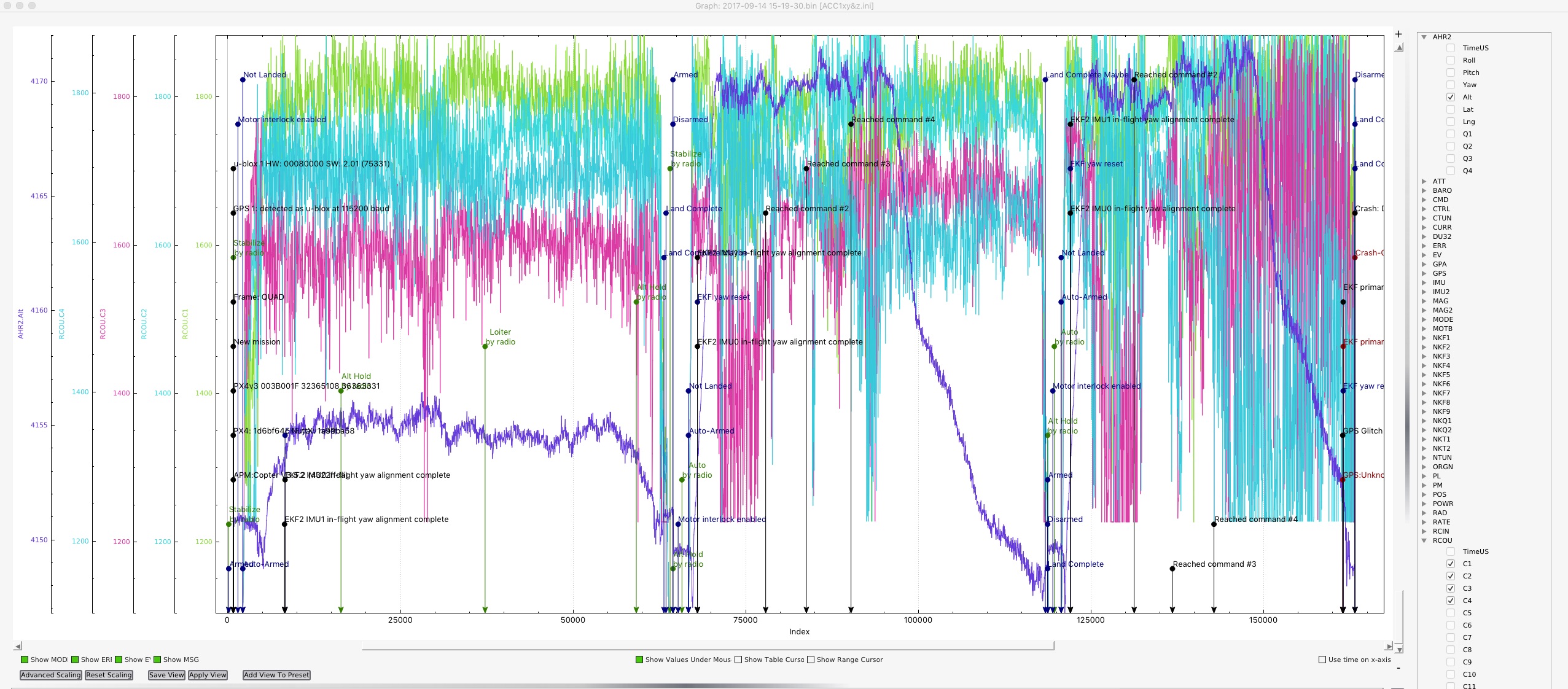
The motors are operating between 1700 and 1900 the whole time in the air, basically maxed out to maintain height.
That leaves very little for attitude control.
A few times there motors had to basically shut down to maintain level flight.
You would have seen a very wobbly flight.
A GPS glitch was detected and it did look like the EKF spat the dummy but I think that was just the push it needed to go over the edge.
We were flying in rough conditions: a really windy environment at around 4500 masl. Is there a way to reduce the output of the motors or regulate it better? Maybe changing a parameter such as ATC_THR_MIX_MAX to prioritise attitude over throttle.
I use 6S batteries with U7 280KV motors and 20x6 propellers.
Thanks for your advice. My motors can only run up to 6S, so that’s a dead end. I have autotune the copter, but only at sea level where it flies really smooth (that’s where we are located) and we rarely go to 4500 masl, like this time. Should I autotune it again under this conditions? It’s a little bit difficult since there are strong winds in that area.