I’m currently working with the Ublox F9P GNSS module in a moving base configuration. I’ve followed all the steps outlined in this guide. but I’m facing an issue with obtaining the YAW value. Strangely, when I connect the F9P directly to U-Center, I can retrieve the YAW value; however, I’m unable to obtain it when connected to the flight controller.
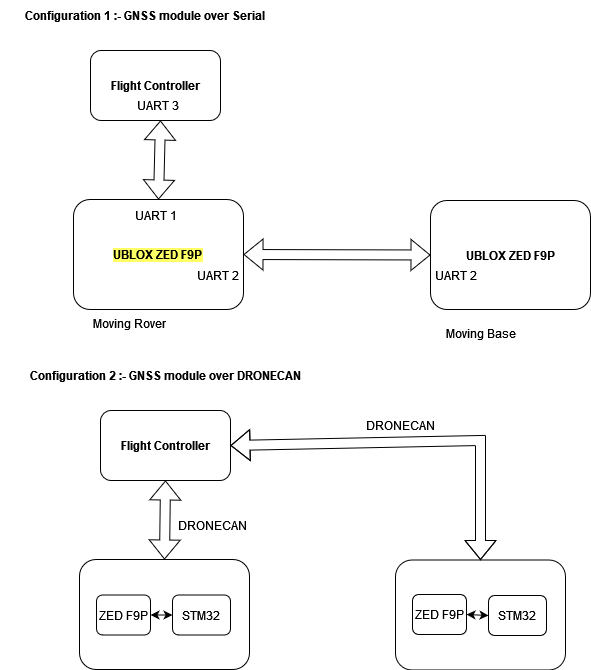
I’ve attempted two configurations, both of which are shared here, but unfortunately, I’m not receiving the YAW value in either setup. Your insights or suggestions would be greatly appreciated.
Reset them to defaults in uCenter, then close that software and preferably never open it again. Connect each to an autopilot UART and let auto configure do all the work. No need to connect the F9Ps’ UART2 in a crossover config. But definitely connect the second module to its own autopilot port.
If you want to save on serial ports, the same is possible via CAN modules, again, letting ArduPilot do all the heavy lifting and avoiding mucking about in uCenter.
In all cases, don’t forget to set the GPS_POS* parameters correctly.
You may imagine that GPS yaw settings are too complicated. You only need to connect two F9Ps to the flight controller and install and configure them correctly. I have a low cost CAN module (C-RTK 2HP) that can replace the F9P. A module implements yaw GPS and does not occupy the uart interface.