Sorry for my request. Simply looking I see that there are all type of systems developed for GPS Denied indoor and other others with limited capacity with beacons and markers. To what extend there is a development with UAV camera images and Google earth map comparing with (AI set) markers either as map (comparing eg road corners, lake shores) or horizontal view (tall buildings, bridges, mountain peaks). Presume surface elevation could be an other. Anyhow is there developments in this? Are there commercial systems available that can be put to the Cube orange?
You can not put a reasonably sized neutral network on a Cube orange. You need a companion computer like the Nvidia Jetson Orin to do that and send the results to the cube orange using a 1500 kbit/s serial link
Dear Lucas, thanks for the fast response, yes a companion computer was what I assumed, what we would need.
There seems to be a combi of Cube Orange and companying computer like by airvolute https://www.airvolute.com/product/dronecore/ . Is there any work at the ardupilot community in this area? Cheers W
In my testing, the ModalAI VOXL has very good performance and is relatively easy to setup. The vehicle needs to stay within about 50m of obstacles (or the ground) though.
Personally I wonder if a very accurate optical flow sensor mounted on a gimbal with a long distance lidar might also work well but this would require some special hardware.
Yes, Indeed checked the Non GPS. Did see the ModalAI VOXL, And looks good. Does it allow mission planning (Wp mission), or is it only camera images AI to find position? Cheers, Winfried
As @rmackay9 wrote, we have this discussion from time to time.
Basically this is an extension of the TERCOM navigation using vision system.
There are some interesting papers you can reade like:
And some interestink links here:
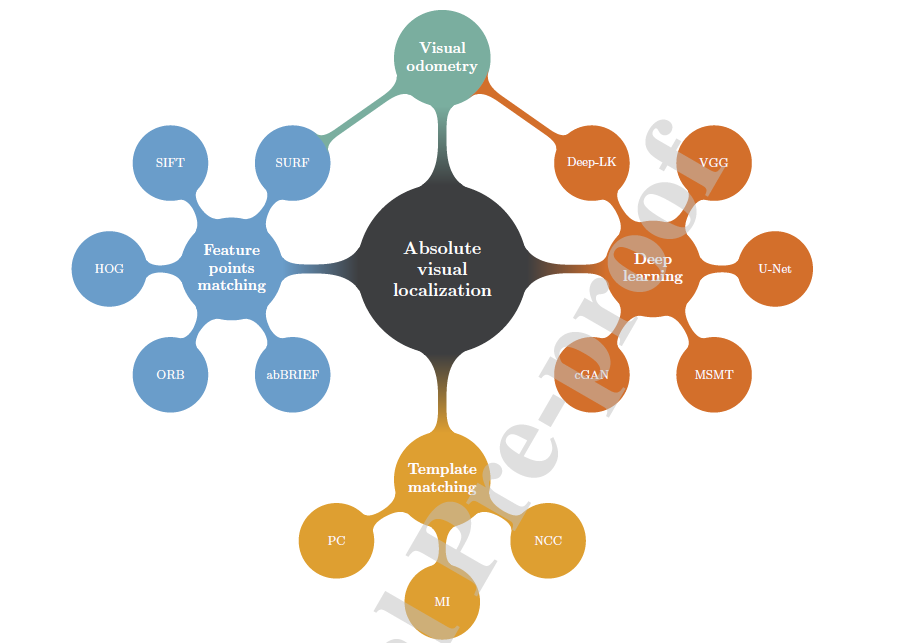
Best candidates are the Neural Networks as they offer much more reliability than the traditionals Template/Features Matching algorithms.
Here is a schematic of the different methods (A review on absolute visual localization for UAV)
The ModalAI camera provides local position estimates to AP to replace the GPS so all modes work including Auto. Internally I think it is doing this using visual “features” … so it finds distinctive things in the video stream, observes how they move and back-calculates the vehicle movements. I don’t think it uses AI.
Hello Randy, i am curious about the VOXL, does it work good? For my understanding it works even at high altitude as long as it stays at no more than 50 meters from a building or a bridge for example? I woud like more info about it.
If lidar is capable of, lets say, 100meters what is the limit of the best flow available today?
Hi, I am to enable indoor navigation using lidar, i tried all the setup steps mentioned in the documentation for the camera, and used vision_to_mavros also data i being sent to pixhawk now, but it is being displayed in Mavlink inspector, i tried to switch the drone to loiter and take a flight manually in indoor space, but it is showing AHRS: waiting for home, I tried set_origin.py to set the home as explained in documentation but nothing helped still showing the same error, we are using pixhawk 2.4.8 and jetson orin nx as a companion computer. Please help i have attached some screenshots for reference @rmackay9@ppoirier
I have just came across your comment and seems exciting. I would love to implement a keypoint detection method mentioned in the survey you shared. Any advice on how to do so? Where should I start in the codebase? I am a computer vision guy that recently got interested in UAS. I have developed a plugin for the Gazebo simulator that lets you upload georeferenced data and set as the ground plane. Any advice in how to move forward in this task? Thank you.
P.S.: If this discussions are open to the public I would love to join!
The concept is sitill up to date as there is a lot of hipe on GPS denied stuff on the Drone Planet.
I like the work of Stephan Sturges with aerial imaging and YOLO (and others).
You can follow his numerous Posts on LinkedIn.