I reinstalled the firmware on F9P and now 10Hz, autoconfigured on 115200baud/s and now it works without any issue. F9P is not reporting buffering on UART, also confirmed that utilization is more close to 10% with an oscilloscope. F9P is reporting about 2,5KB/s of messages sent over UART.
I checked that the configuration set by autoconfig is the same as before the reinstalled F9P firmware.
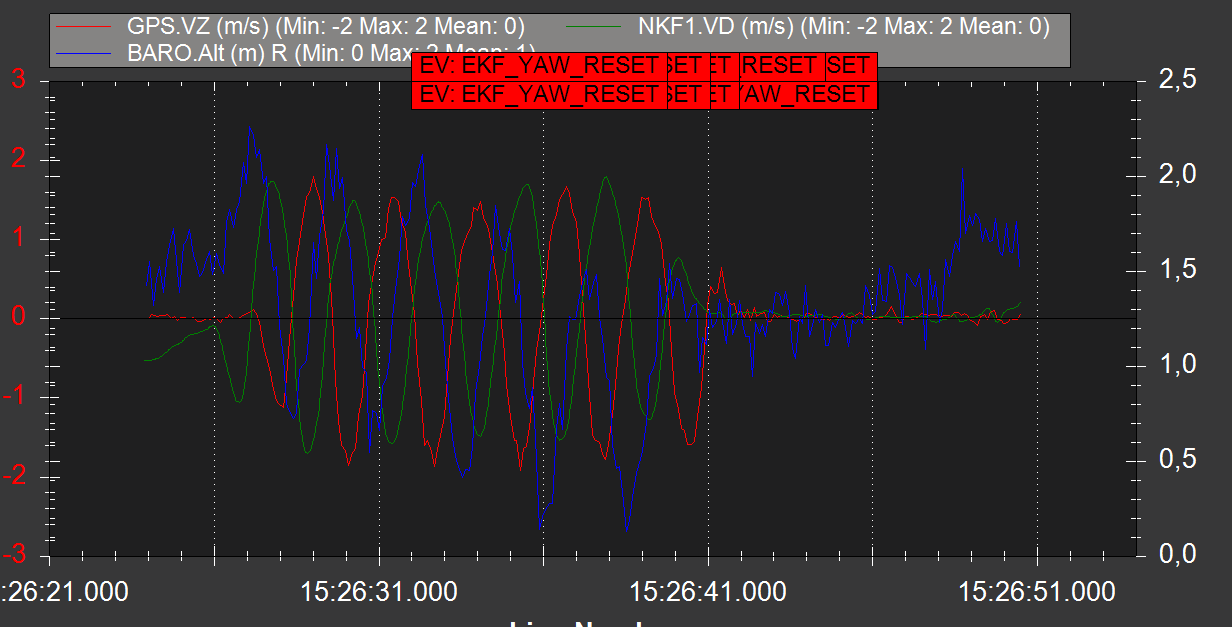
Also now tested the latency with autopilot. The latency of GPS.VZ compared to NKF1.VD is around 70-100ms, which is certainly better than before. Originally the latency was 1000ms, then with 230400 it was 100-200ms.
I had these issues with two drotek F9P + cube black setups. Both were fixed by reinstalling the newest firmware.
Conclusion: 115200baud/s is more than enough for 10Hz update rate. Reason why reinstalling firmware fixed the issue is unknown, as all configuration is the same.
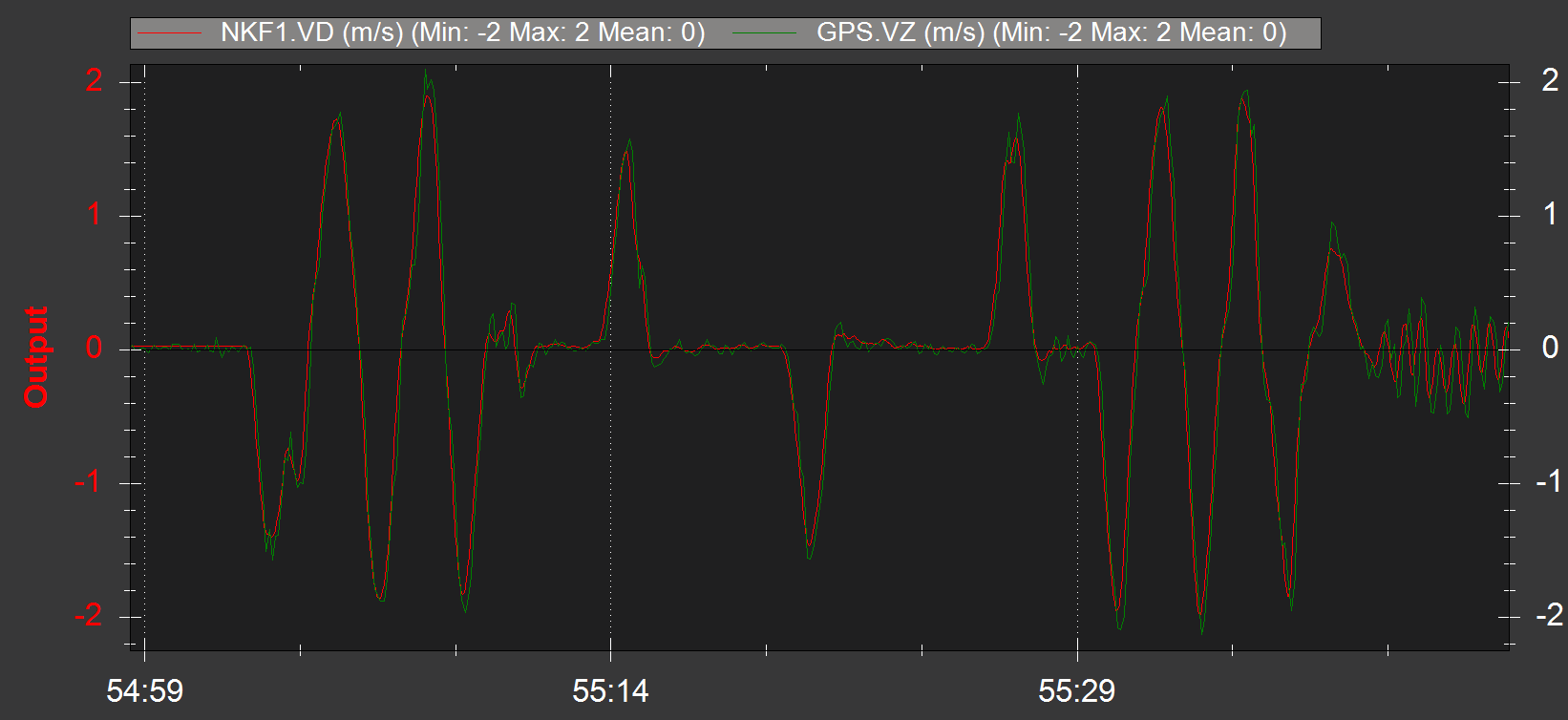
Heres an image of the latency being normal now with 10Hz