I recently replaced my Here3 with a new one.
After calibrating the compass, I was getting a mavlink error:
WARNING: EKF3 WAITING FOR GPS CONFIG DATA
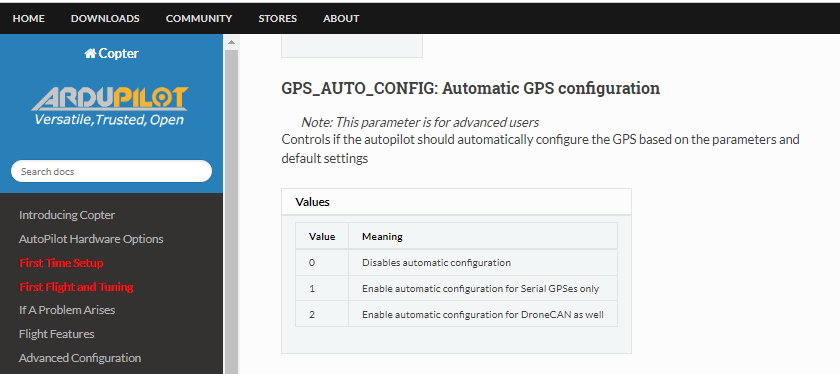
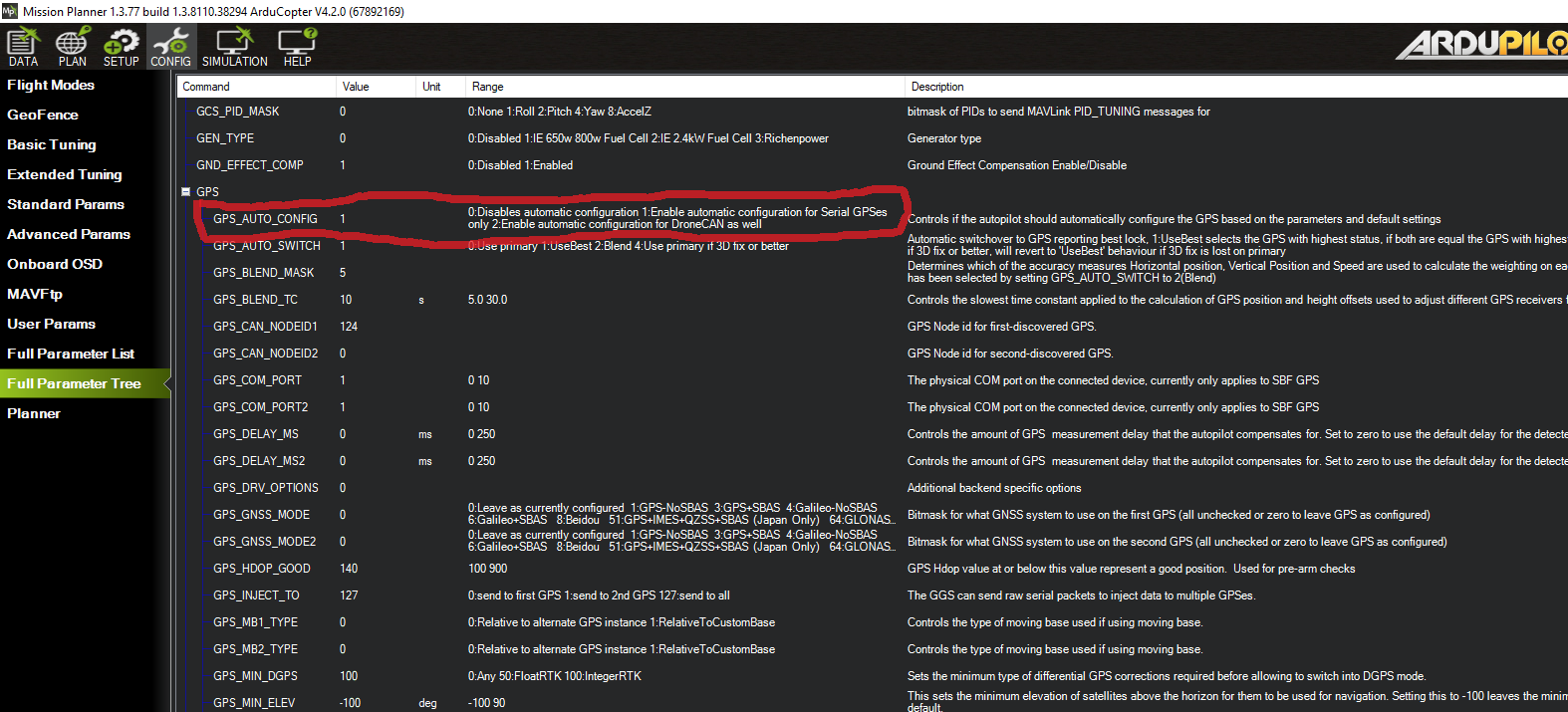
Investigating, I found the parameter gps_auto_config. Using Mission Planner I set it to option 2 as this device is a uavcan device. (option 2: Enable automatic configuration for DroneCAN as well)
That failed to fix the problem, so I reset the parameter to option 1 - serial connected GPS. (option 1: Enable automatic configuration for Serial GPSes only)
The error stopped occurring - and the GPS functioned normally.
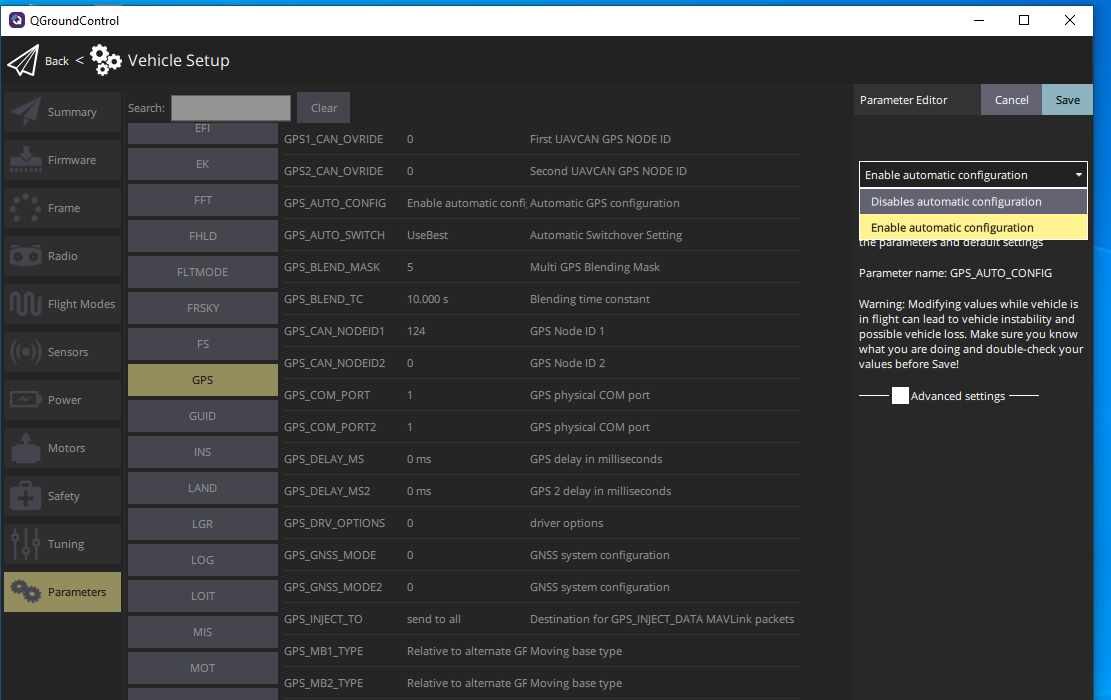
Later that day, I looked up the gps_auto_config parameter on Qgoundcontrol. On Qgroundcontrol, the options for this parameter are different: either “Enable Automatic Configuration” or “Disable Automatic Configuration.”
Having selected options “1” Qgroundcontrol reported that I had selected the “Enable Automatic Configuration.” option.
From this it would seem that the text on the Qgroundcontrol app is correct, and the text in Mission Planner and the Parameter List are out of date.
Or perhaps there’s some difference between UAVCAN and DRONECAN, and that a Here3 relies on the “Serial GPS” connection option.
Reference: https://ardupilot.org/copter/docs/common-uavcan-peripherals.html
Thanks!