Problem: the GPS always has NO FIX and i get PreArm: Compass not calibrated error. When i try to calibrate the compass, i get error compass variance.
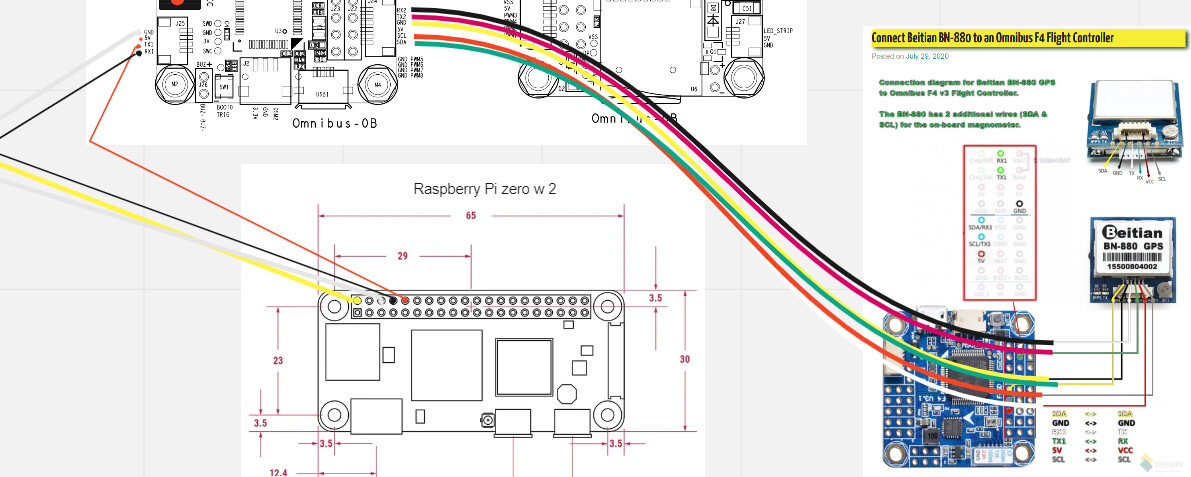
im building my first drone with omnibus f4 v2 and Beitan 880 Gps and Compass combo. Atm i have no radio or receiver. A raspberry pi is connected to uart and shall be used to control the drone.
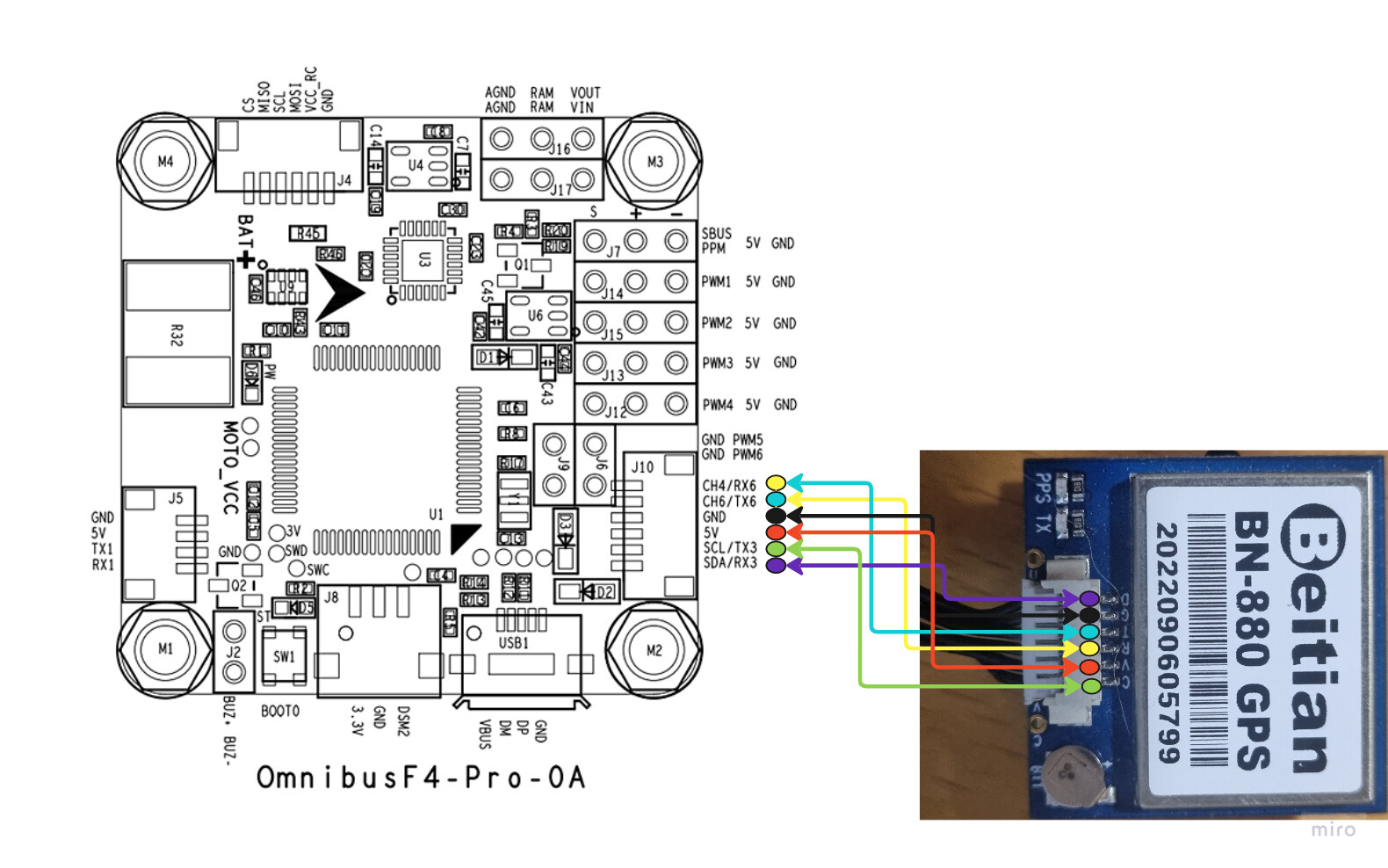
sometimes manufactures mess up the silkscreen on the units you can try and swap your tx and rx if you are sure that you have tx-rx and rx-tx. Are you indoors trying to get a fix if so maybe take it outside see if you get a fix then? care to share a photo of your setup. having compass wires near high voltage wires will cause issues as will having them near your vtx gear.
Thank you for your answer. I have tryed it outside and with an second flight controller, also omnibusf4 pro v2 having the same issues. The wires are looking messy but i checked 5 times if the wires are correct. I think there are no high voltages around. Maby there is some issue with the Ports im using?
My bad im using 4.3.3 sorry im new to this forum. Also it is very unlikely, that there is high current around the areas i was testing. Maby the screenshot provides more information, that might help.
The fact that PPS is off usually indicates no GPS fix.
Please note: There is a difference between GPS signal reception and GPS lock.
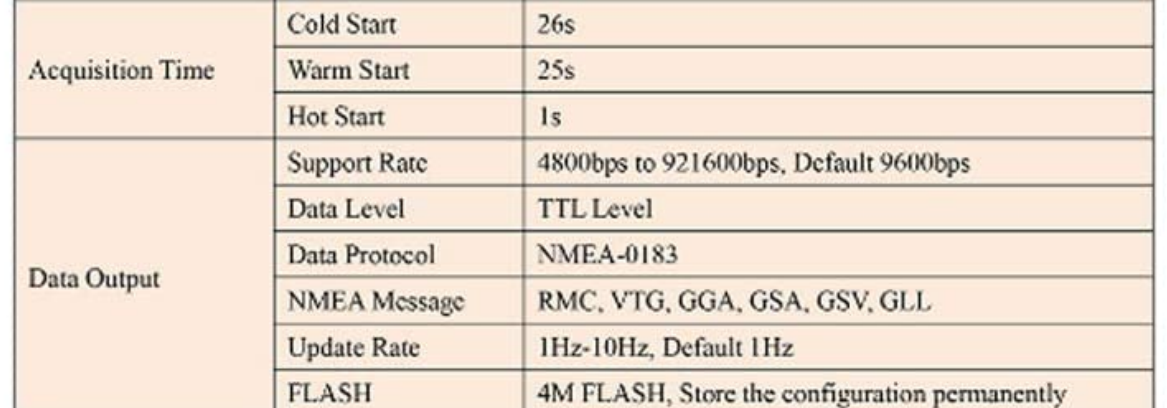
If you never had GPS lock or haven’t used the GPS for many months, then a cold start will be required. This can take a few minutes in an open area (no trees, tall buildings, etc…) before a lock is established and the unit “knows” where it is in the world.
After this initial lock a GPS start should progress much faster.
If in doubt you could connect that receiver to a computer running Ublox’s U-Center to confirm / change settings as required.
An important part is having correct baud rate selected.
Tanks for your Help! I will try a cold start if you suggest so. It would probably take me some time, because I have to figure out, how to do this without RC. Maby I can connect a bluetooth- Ps4 controller to the Raspberry Pi and try this out.
Just noticed:
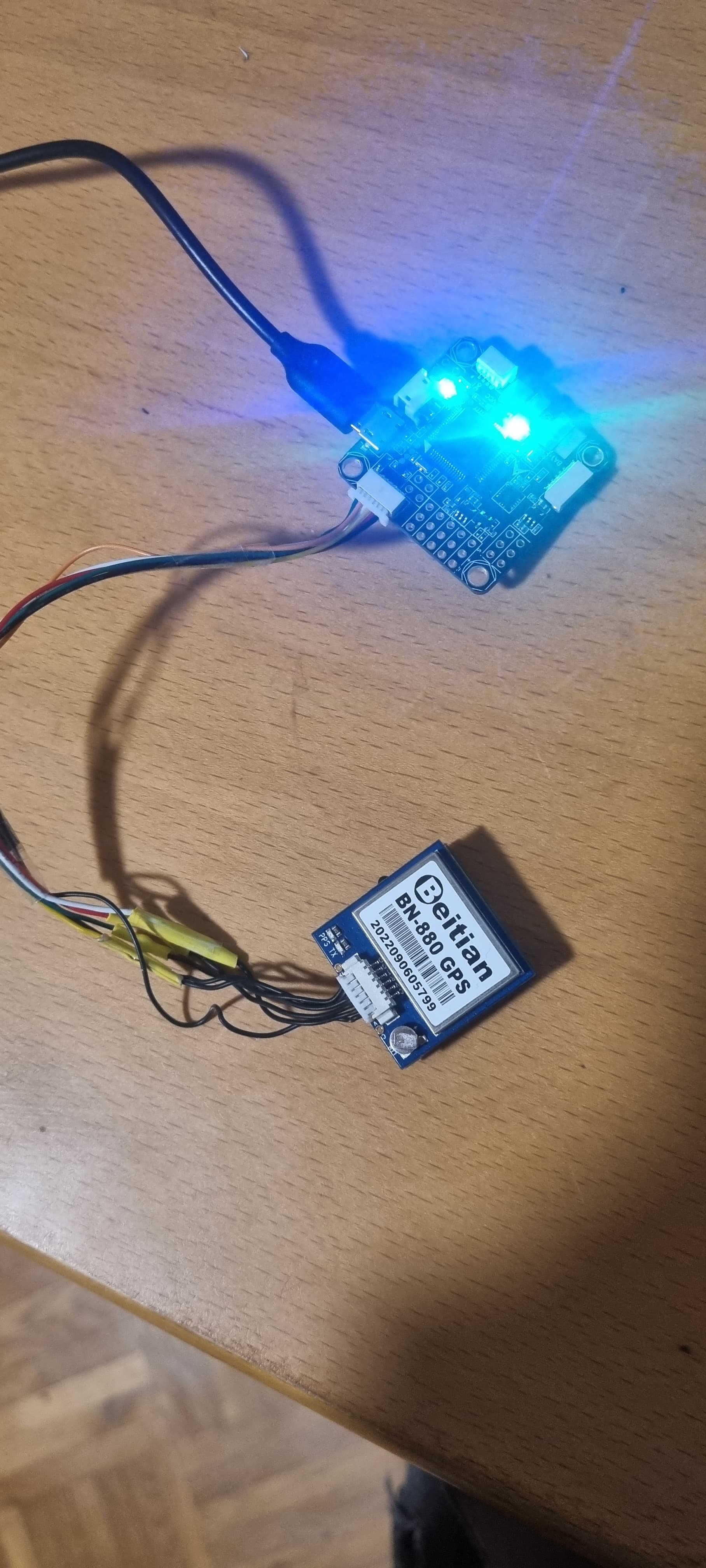
You’ve got the GPS unit upside down in your photo above.
The side with all the writing needs to be face down.
The other side with the big square block on (often grey or beige in colour) is the actual antenna and needs to face up.
Im aware of that. A cold start like @Karl_Schoelpple mentioned, could be a bit difficult for me, because I planed the drone to fly autonomous, which requries GPS or RC
Thank you, I know that. Im usualy having the antenna face upwards. It was just for the picture. Can you confirm, that the wiring actually works like i did it?
At this stage I wouldn’t worry about the wiring.
The fact that you’ve confirmed the power light on the GPS unit comes on is enough to indicate it should start receiving GPS signal.
The term “Cold Start” relates to a GPS unit having to lock in signal from Satellites for the first time. (or after not being used for a long time).
That is why you see different times stated in the technical data of any GPS receiver.
You have to keep in mind that manufacturers like to use best performance values and as such 26s for a cold start is rather optimistic.
2-5 minutes is more likely. Especially if you have anything like tall buildings, power-lines, trees,…causing problem with reception.
That’s why an open, flat area outdoor works best for first time signal acquisition.
Once you have GPS lock the PPS light should start flashing every second. This indicates unit provides location data. (That actual light refers actually to an additional feature of some GPS receivers, but not relevant for us right now.)
Once the PPS light flashes you should get data to the FC. If that is not the case then we will have a closer look at wiring and baud-rates.
If you have any doubt you can swap the Tx and Rx wires and see if it improves - won’t cause any damage.
As 406FPV mentioned, sometimes the markings on the GPS unit can be the wrong way round.
It’s worth noting that “GPS: No Fix” as in your screen shot is quite different from “No GPS”. This suggests that the connections to your GPS receiver are working and the flight controller is receiving data from it, just that the GPS receiver hasn’t got a fix. If it has power lights on, and with a good view of the sky for over 5 minutes, and the PPS light isn’t flashing once per second, I would suspect a faulty GPS receiver. If you look in the bottom left of the map display it should show how many satellites its tracking. What is it showing?