I have a companion computer onboard a Pixhawk drone performing a mission of:
- store current location on companion as home location
- takeoff to 6m altitude
- setting position target about 30m away
- setting position target to return to 14m above the home location
- once reached a USB camera is turned on to assist landing
- set position target of 6m above home location repeatedly
- once 6m altitude reached, perform landing
Sometimes the drone flies back to a location that is over 7m horizontally away from the expected home location yet the logs do not indicate this and in the last 3 steps above, Arducopter thinks it is directly above the home location as requested (<0.2m difference).
It seems I have a GPS issue, so I examined the log of a typical flight (available here).
HDop, HAcc and NSats look good for the entire flight:
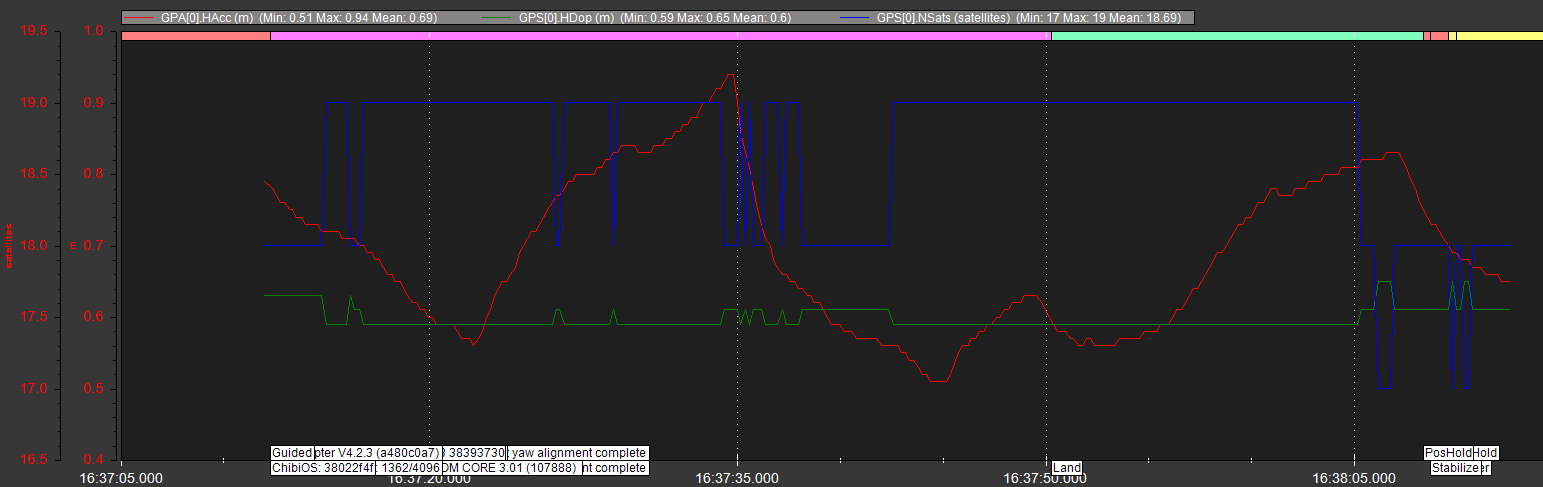
As mentioned, once landed Arducopter reports that the takeoff location is identical to the landing location. Anyone know if the information I am logging is trustworthy? I was hoping to see much more significant GPS problems in the log.
Thanks!