I am facing a problem with a dual gps setup for moving baseline. Both the gps modules are connected on the same canbus and I have everything setup as described here: GPS for Yaw (aka Moving Baseline) — Copter documentation).
I have tested it with two here pro gps modules and also with two here 4 gps modules. Both have the same error: GPS[2] yaw not available. If I set gps_type to 23 and gps_type2 to 22 (switching base and error), it gives the error GPS[1] yaw not available. So I think the parameters of the rover gps are not correct.
The number of satelites is around 30 on both modules. The distance between the two gps modules is about 40 cm.
Please ignore the other errors, compass is already calibrated.
I’m using a cube orange+, I have tested it with the V4.4 and V4.5 firmware and they both give the same error. The gps modules are both connect through canbus 1.
I think the HerePro should support moving baseline. Share your parameters, please.
Here4 can be problematic, as only some versions of it support moving baseline, and it’s not readily apparent to the user whether this is the case. I do not recommend it for this application.
Please confirm that your HerePro modules DO NOT look like the one pictured below (with clear plastic surrounding a large portion of the perimeter). This is an Alpha unit that has proven problematic in the past.
If yours have only a thin clear plastic band between two black halves, continue reading:
The only obvious error I’m seeing is this one on the CubeOrange+:
GPS_RATE_MS,100
Set that parameter back to the default of 200.
Then take your vehicle outside and power it on for at least 10 minutes.
Thank you for your response. We have the other here pro modules, so that should be no problem. I’ve tested it this morning with the GPS_RATE_MS set to 200, but the problem still excist.
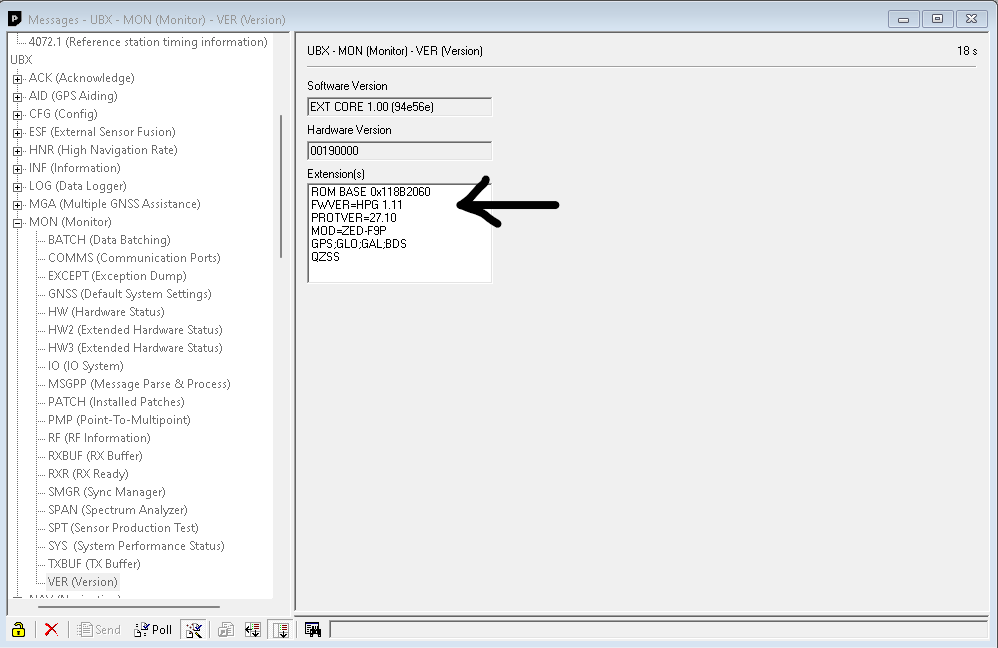
On internet I found something about the firmware, that it must be above firmware version 1.32 for moving baseline. The modules I’m using have version 1.11, but I am unable to update it.
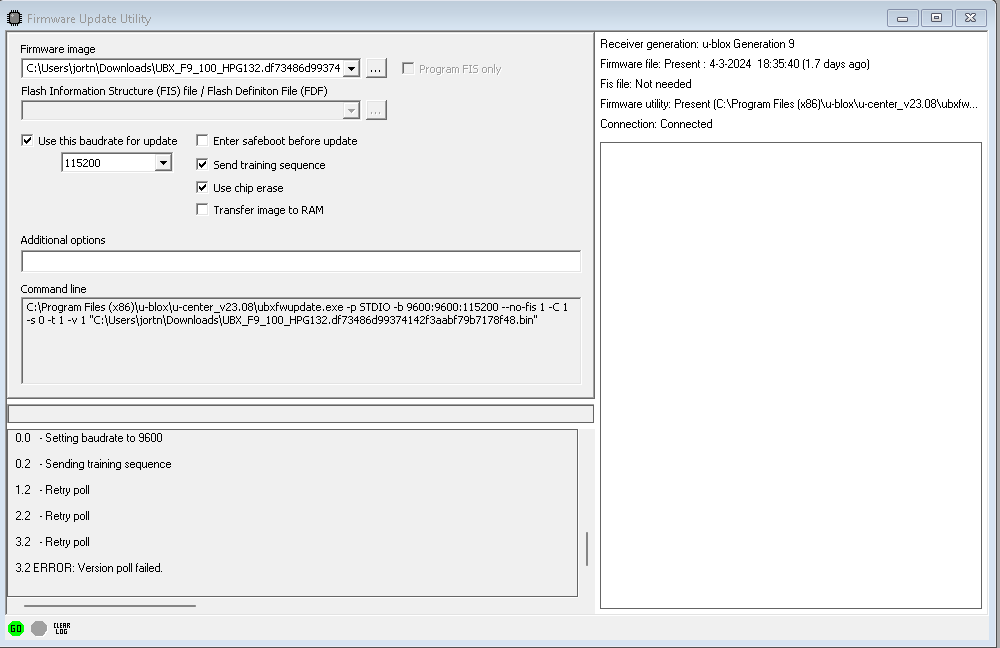
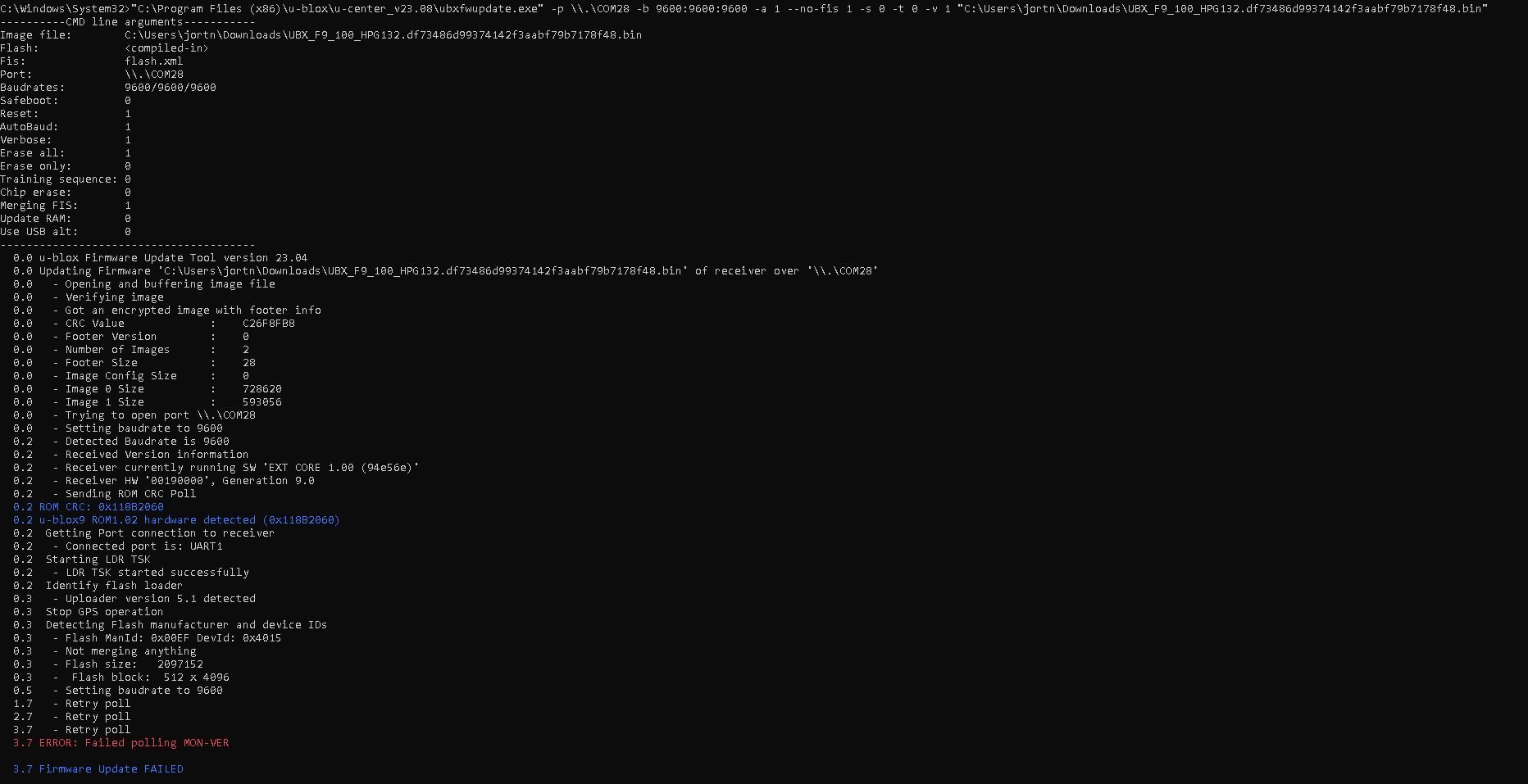
If I try to update the firmware in U-center, I get this error:
Maybe I have to change a parameter of the here pro (like the here 3), before I am allowed to update the firmware. But I can’t find anything about this.