I have tried all sorts of settings, but nothing seems to fix the error. I have tried multiple cables, and two different GPS units. I’m running RS-232 on a short twisted cable. I am getting 25 satellites and an HDOP of 0.57. What is going on, and how can I fix this?
Did you ever manage to find a fix for this behaviour? We’re experiencing the same thing and nothing is jumping out in the logs to explain it.
We enabled LOG_DISARMED to look at the messages present and found nothing of note.
The aircraft did have several EKF_YAW_RESET events during the flight, which we have previously resolved with compass calibrations, but to no avail here, also with ~25 sats.
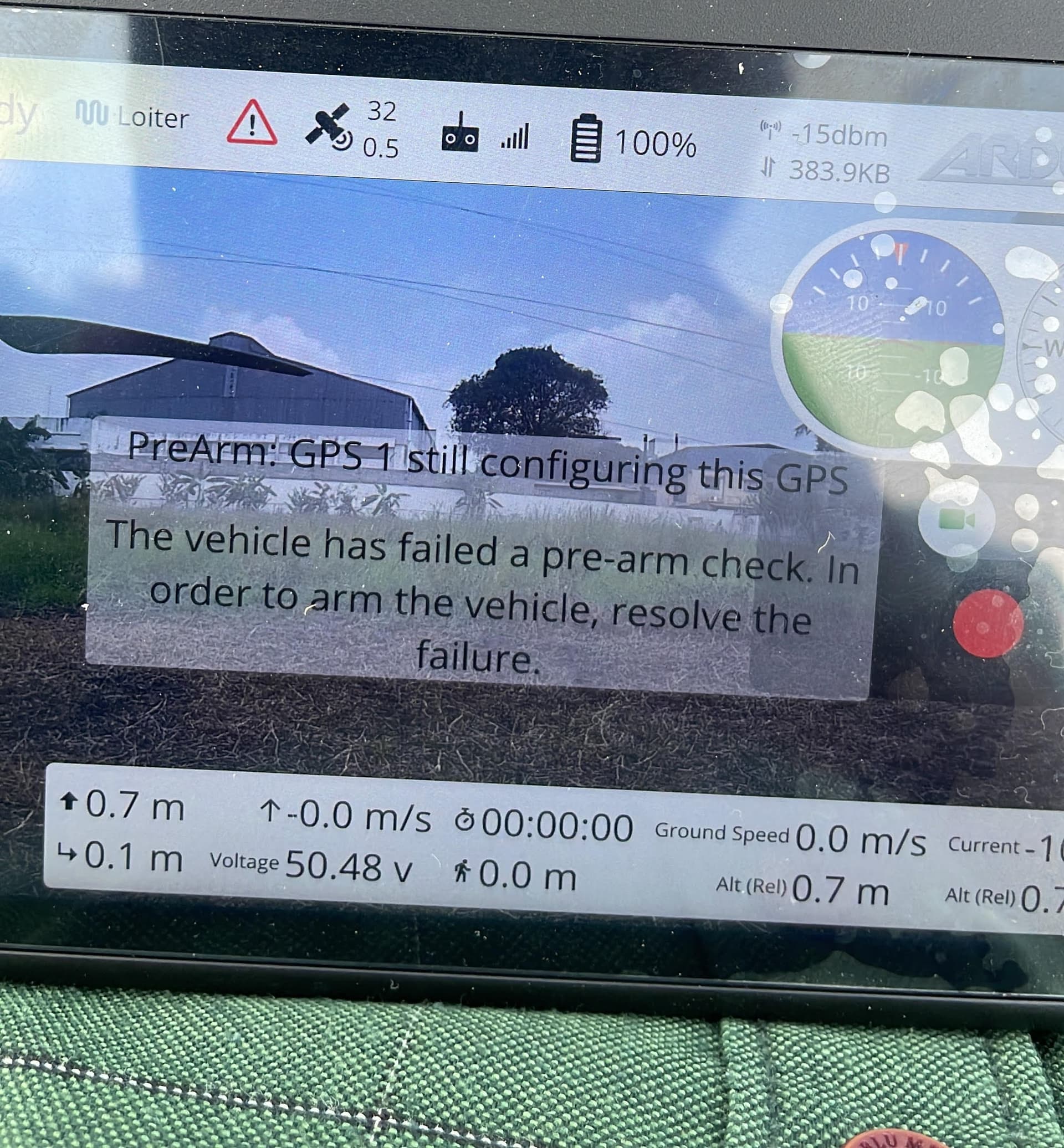
I am also facing these error GPS1 Still configuring GPS .
Here 4 GPS
Pixhawk Orange Cube + CAN_D1_PROTOCOL: 1 CAN_D2_PROTOCOL: 1 CAN_P1_DRIVER: 1 CAN_P2_DRIVER: 1 GPS_TYPE: 9 NTF_LED_TYPES: 231
Changed the above parameters.
Note: The GPS1 Still configuring GPS error is coming but few minutes it will disappear and again its coming that time the motor are not armable.
I have a similar issue. I can arm the motors though. My serial GPS params are active but I will disable and see if it that made the error go away. I do see a GPS error in the log file.
Here is my log file. I wonder if this is why in loiter mode sometimes I start to see oscillations…
I am using:
Cube Orange Plus
Newly installed Here 4
I’m still getting a similar error on 4.6.0 beta 5 - though this has been persistent since I was on 4.5
I have 2x GPSs fitted: 1 is a MAX-M10S, 2 is a SAM-M10Q.
Settings for both are identical, thought I only get the error for GPS1:
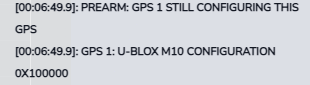
Pre-arming, the error comes and goes. When I get the “U-BLOX M10 CONFIGURATION 0X1000000” message, I can then arm, and I don’t get any issues throughout the flight. It’s not a critical problem but is a bit annoying.