Hi all,
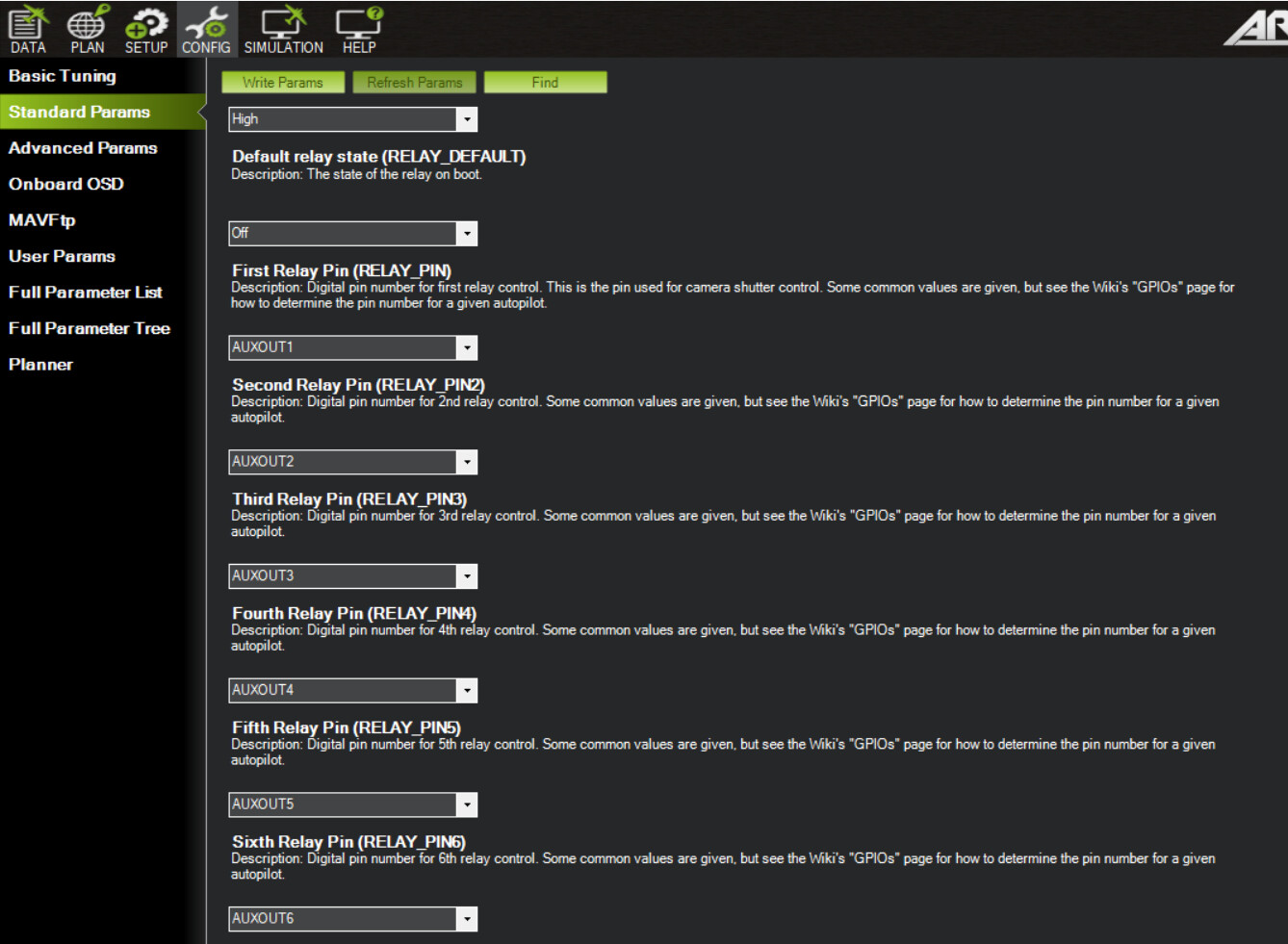
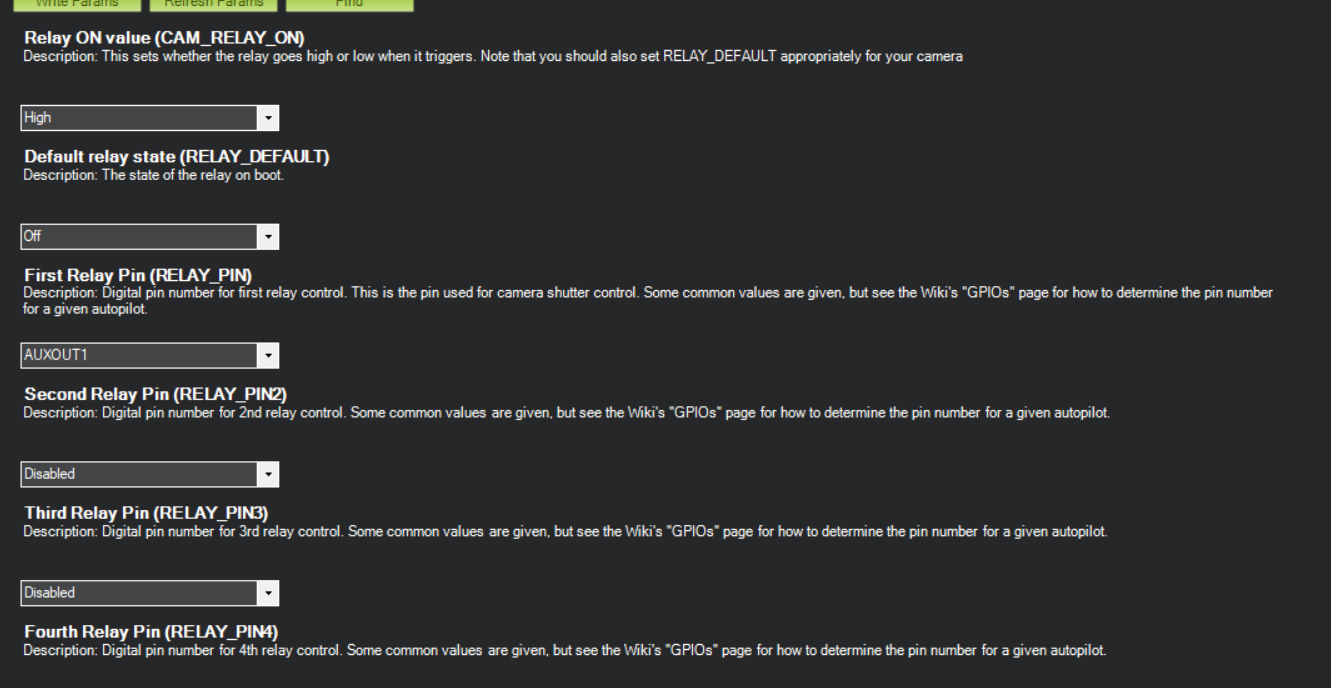
I am using Ardurover firmware and I am currently trying to set AUX out as a GPIO. I have read the documentation on GPIOs — Copter documentation, and i am figuring out a way to trigger a relay. Below is the setting that i made via MissionPlanner (assigning first relay pin to AUXOUT1).
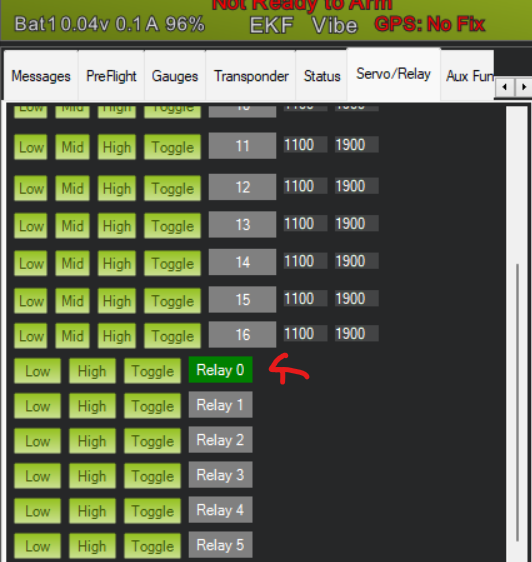
When i set the relay to high, it display a green icon. But multimeter displayed 0 volt when trying to measure from data line to ground. Is there any other setting that i need to make for this to work?