Good morning;
I have a really bad problem on my Emax Nighthawk 250;
I describe what happens every time flight: mode : stabilized ; It makes a very stable and slow flight , after a few minutes of flying here that the model becomes ungovernable; as if all of a sudden become the mode ACRO; this is very dangerous because I can not predict when it will happen to me, and especially if I am in stabilized mode must not become acro … please help me guys .
I’m desperate and I can not understand what the cause of it all.
Thank you very very much for your kind attention.
I’m sorry;
thank you very much for your disponibility @mboland; is the firt data flash log for me; I’m not sure that these are the correct data; below the log:
Test: Compass = GOOD - No MAG data, unable to test mag_field interference
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = UNKNOWN - No GPS log data
Test: IMU Mismatch = UNKNOWN - No IMU log data
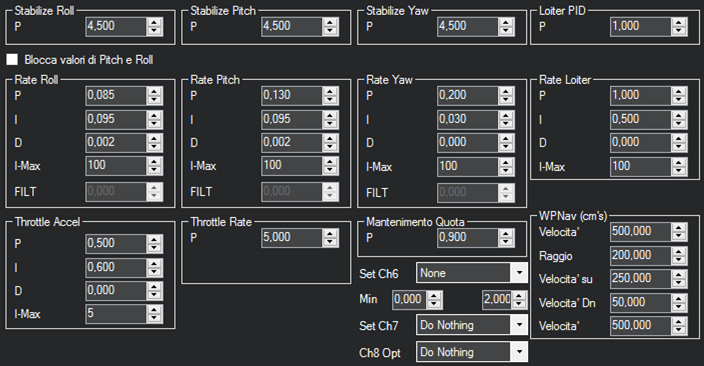
Test: Parameters = GOOD -
Test: PM = NA -
Test: Pitch/Roll = NA -
Test: Thrust = NA -
Test: VCC = GOOD -
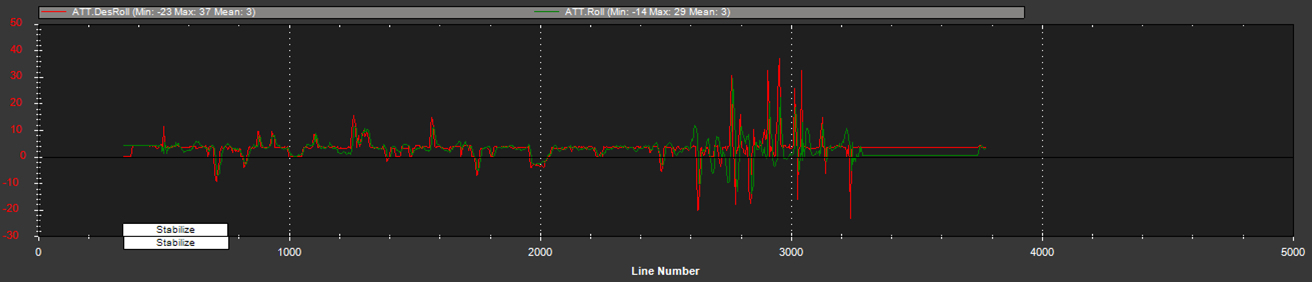
as you can see into the image of the desired Roll and effective Roll: at the end there are crazy parameters, and it was the time when the quad answered as if in ACRO mode; and then they landed.
Is possible that the problem is not the APM mini? But… For example one ESC?
It is not possible to control the quadcopter if one ESC is crazy; but, is possible that in the first moment of the fly all is perfect and after some minutes… Not the same? I really can’t understand; what do you think? Is possible to verify this option?
Thank you very very much, and sorry for my english x_x