Seen the lack of FPV traditional helicopter build logs/ detailed infos I thought would be useful for the community to share some details of this project here.
The frame speaks for itself: robust, agile and most important nice-looking.
The idea was to have a little frame capable of performing mild aerobatics, sort of scale flight FPV ( the “Loach dance” style of flight) while maintaining full automatic flight capabilities.
The heli is equipped with the following:
Flight control: Holybro Kakute F7 HDV AIO (V1.0);
GNSS: Matek M8Q;
RC: Frsky R9M Access/ R9 mini receiver;
FPV: Dji FPV, Dji Air-unit ;
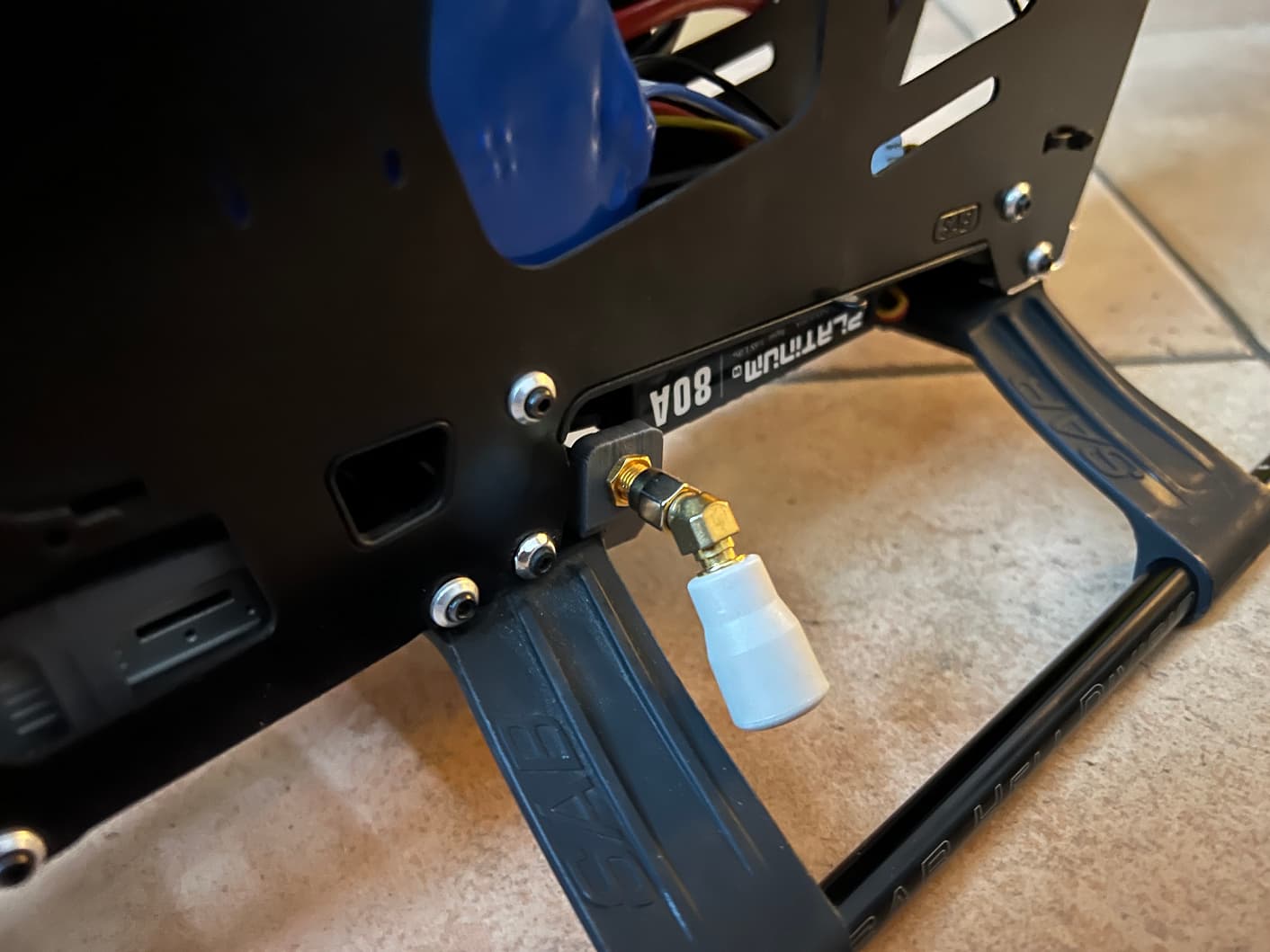
ESC: Hobbywing Platinum 80A V4;
Engine: Skorpion 1450kV;
Battery: 6s 5Ah;
Swashplate servos: Savox SX1258TG;
T/R servo: Futaba S9254;
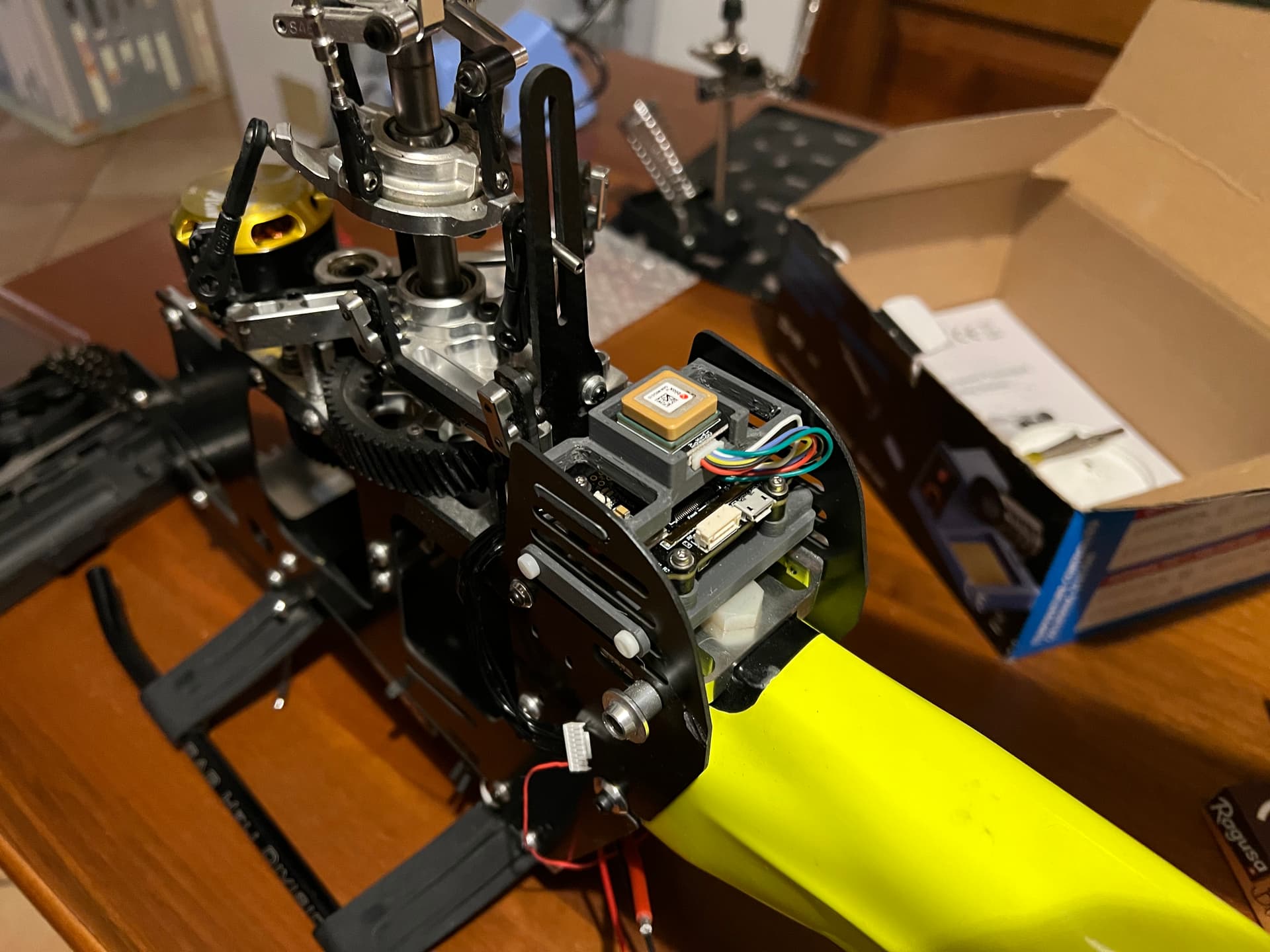
FC has been installed in the original location of the FBL unit, together with the GPS receiver (location of the GPS unit is not ideal, borderline in regard of EMI, but still acceptable for safe operation):
FC is assembled with the supplied rubber dampers, bolts “lightly” tightened.
the main objective here was to keep the silhouette as close to original as possible, so no ugly “stuff” hanging around outside the fuselage.
Installing the FPV equipment was really easy, as this airframe has a nice roomy bay just below the battery slider:
Most important, the lower support is aluminium made, with heatsinks (originally intended for ESC dissipation), so it comes really handy to provide additional cooling for the fpv Air Unit.
detail of the fpv bay/ camera support:
The tuning of the attitude control is now being optimized, especially the “higher speed” range (I haven’t pulled beyond 30 m/s yet), but results are really promising.
This action was perfomed in Acro flight mode with goggles on:
@Ferrosan You show “PID tuning is perfomed directly from my Horus radio, using Yaapu GCS”. What version of Yaapu are you using and how did you add the page Heli Tune? Can you change a parameter on that screen and send it to the Heli? This is a great feature to have, please explain more.
Hi @Thermal_King16 Dan, the biggest issue here is the compass, I’m waiting on titanium bolts to replace the stock steel ones.
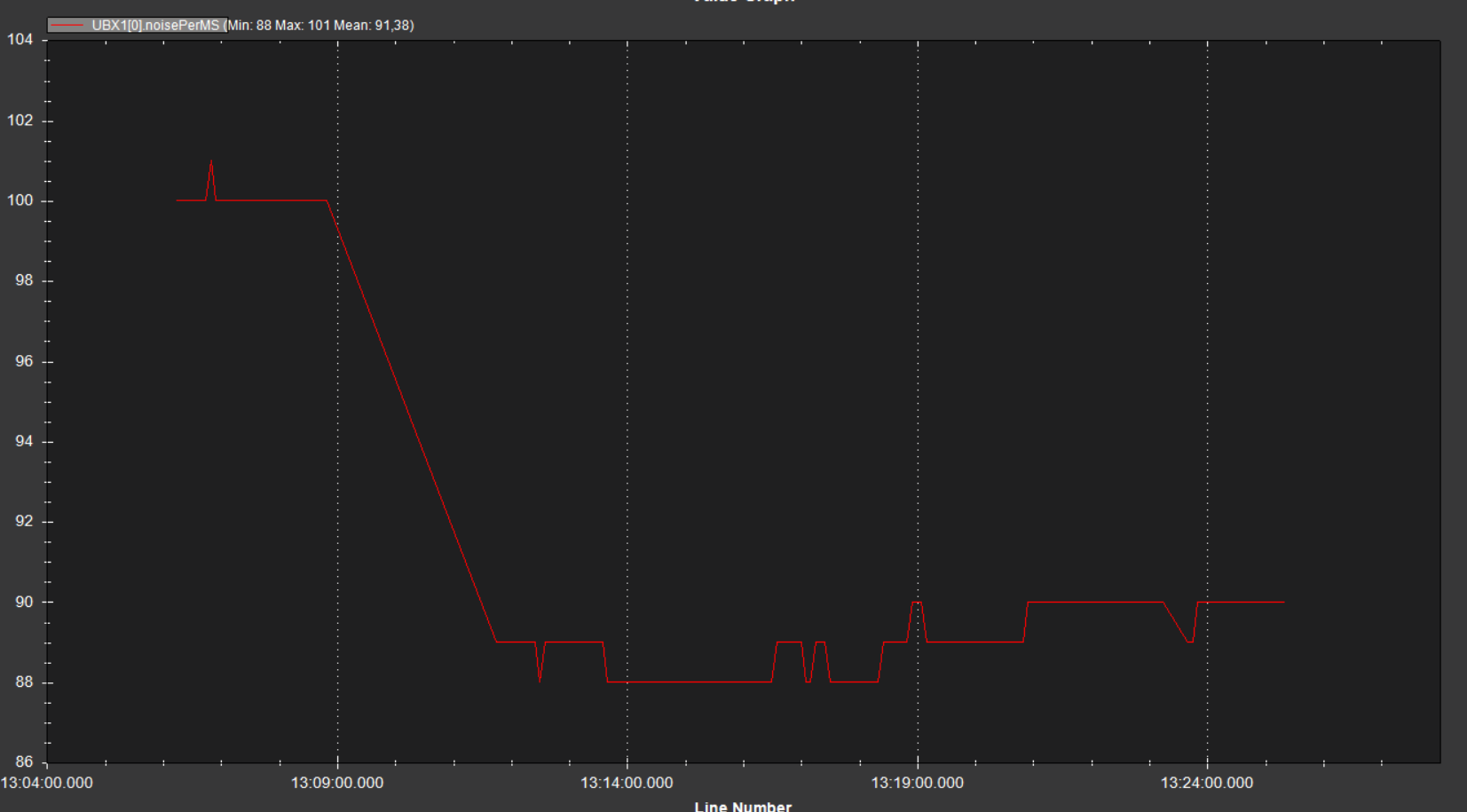
GNSS receiver doesn’t seem bad (compared to a “clean” configuration), I have put some additional shielding (considered the vicinity to the micro of the FC):
@Ferrosan Thank you very much, installed the GCS, works well. I had no idea the GCS existed, I’ve been using the yaapu widget on my X10 Express for Helis for over a year.
I’m new to Arducopter, and returning to helicopters after a long absence, so looking for some help and guidance please!
I’m building something similar, using a Kakute H7 V2 FC, and the same ESC (Hobbywing Platinum 80A V4)
I’m a bit confused about how this is all connected, particularly which pins to connect the ESC throttle signal, RPM signal and BEC wires to. Am I right in thinking the throttle signal should go to M8 on the FC?
Hi @Flowshot , you can connect the esc to whatever pin is more convenient to you (output can then be re-mapped to the specific pin the esc is hooked to). Regarding the BEC, I was using the ESC one and I built a little distribution board to share the 6V power to the other 4 servos. I wasn’t using RPM sensor on that machine, so all the governor stuff was peeformed by the Hobbywing.
@Ferrosan , thanks for the info, that’s really helpful!
So just to confirm - if I want to use Arducopter for the governor function, I can hook up the ESC RPM wire to any spare FC pin (such as a spare UART?), and then re-map it in Mission Planner/QGround Control etc?
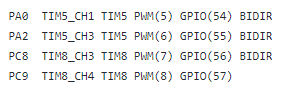
No, if it’s an Hobbywing it’s not serial, so you can’t connect to an UART. Normally we connect rpm sensor to specific servo rail slot and set that pin to GPIO. You might have to find out what type of signal the ESC is outputting (pwm? GPIO?) .
@Flowshot just make sure to check what type of signal the ESC is outputting (I never used that function of the ESC so I’m not much help here). On the flight control side, to check the RPM is working you can simply connect one of the FC cyclic servo signal directly to rpm pin, you should see MissionPlanner reporting 7500 rpm (servo frequency being 125Hz).
@Ferrosan ok brilliant. I’ll give that a go when I get to that stage and see if I can make it all work. I’m just starting soldering/crimping now, so I should know in a few days if I’ve got it right!