I’m running ArduCopter 3.4.5. Using a UHF RC control system talking to a Navio2 through SBUS.
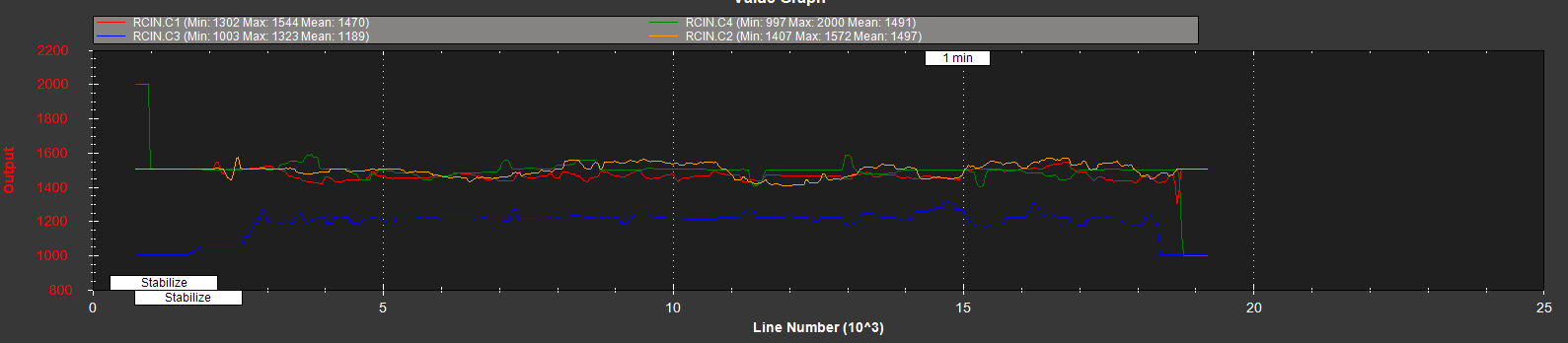
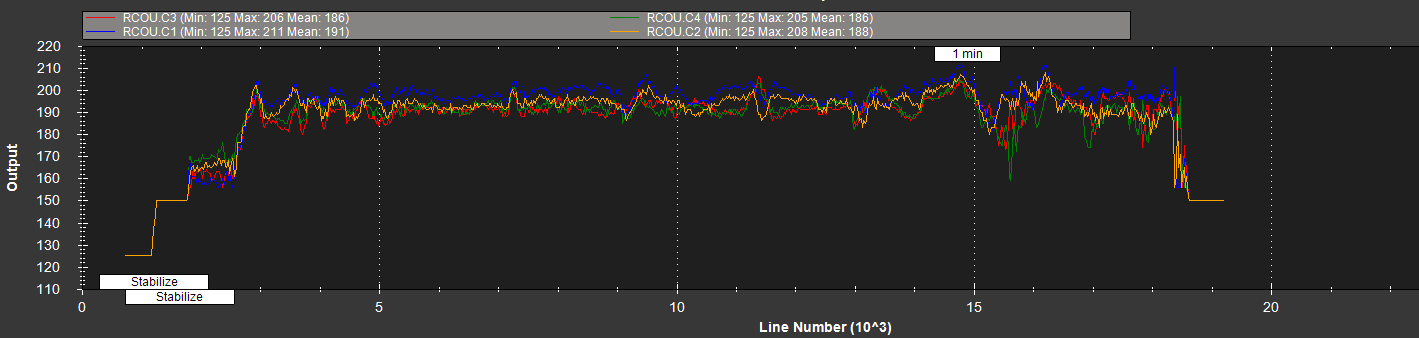
In flight, the aircraft suffers glitches in roll, pitch, and throttle. While the quadcopter is flyable, the glitches cause it to have instantaneous small convulsions in roll, pitch and or throttle. It is almost like it is having problems with static discharges the way an RC helicopter with a belt-driven tail can have them. Of course here there are no belts.
This is an extension of the same problem I’ve been having with the chattering motors while unarmed.
I’ve got a nice log from the last test flight - what can I look for to check this out?