Yesterday, with one of our copters a glitch during the end of the landing phase occured. We flew several waypoint missions with this system the same day at this location without any problems. The copter is a Tarot 650 2kg class, classic Pixhawk and f9p (without NTRIP correction in this case).
I would try to understand, what happend. So every help is welcome.
Real GNSS glitches can occur with solar flares. There is no way to predict them.
But sometimes the glitch in induced by RF interference, in that case, moving the GNSS antenna higher up, away from other electric components might help.
Anyway, updating the GNSS firmware and ArduCopter to 4.2.1 might also help
A solar flare is very unlikely, I think. We flew several missions this day at the same location. Before and after that occurence (ok, with another system). You definifly recognize a GPS glitch as cause in the logfile?
Do you have concrete informations about problems regarding AC4.1.5 and/or ublox V1.13 in conjunction with GPS glitches?
ublox V1.3 is no longer available, and Ardusimple does not provide configuration files for the new V1.32 till now. So, we stayed at 1.13 without any problems so far, during lots of flights with different machines during the last years.
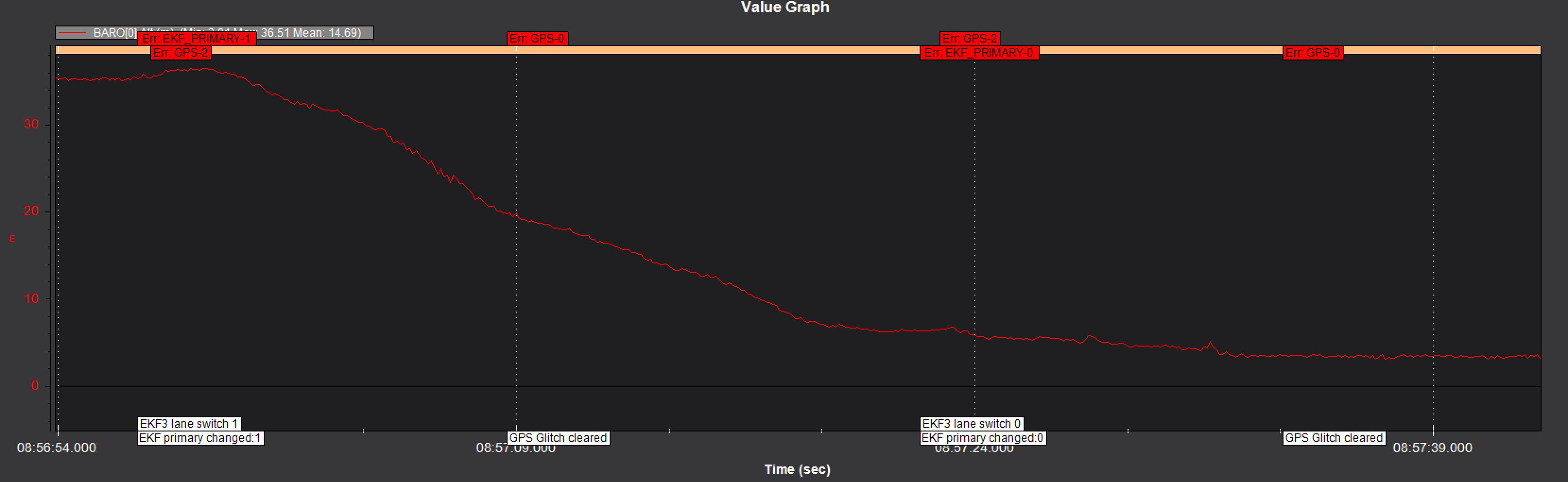
Can you give me a hint what exactly Err gps-0 and Err gps-2 means?
Edit: forget that question, found it by myself, sorry!
Edit2: How is a gps glitch detected by AC? As far as I can see, there is no significant hdop or numsat drop in this moment?
What also makes me wonder is, that the copter didn’t react to thrust increase (RCin3) in this moment.