I’m having trouble with a MAVLink controlled gimbal (basecamelectronics firmware) with AC4.0 where the applied angle commands from RC are limited to a wrong range. Same setup works well on AC3.6.12.
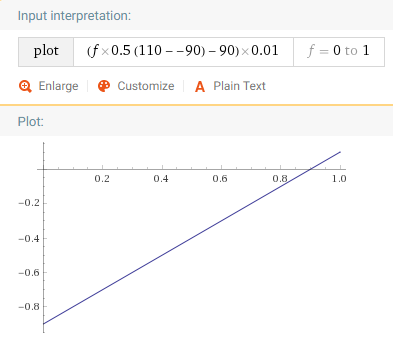
On 3.6.X the gimbal works like expected with these settings mentioned above. On tilt axis, it can point -90 degrees down and +10 degrees up.
On 4.0 the gimbal range is limited to -90 deg to -40 deg with these same settings. Note that I don’t know if the autopilot is commanding angles lower than -90 deg as it is limited by the gimbal software and hardware.
Using MTN_ANGMAX_TILT = 11000 (+110 degrees) and MTN_ANGMIN_TILT = -9000 (-90 degrees) gives the wanted control range of -90 to +10 degrees.
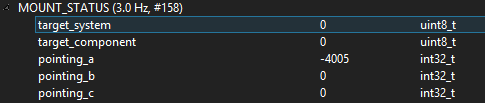
I checked the MAVLink messages with Qgroundcontrol MAVLink inspector and found that MOUNT_STATUS message, which contains the commanded angles, has limited range.
It should have the range from -90 to +10 degrees, but the commanded range is only -90 to -40 degrees.
This message is made here:
And the following angle set here on RC control:
Can anyone spot where the cause for the problem is?
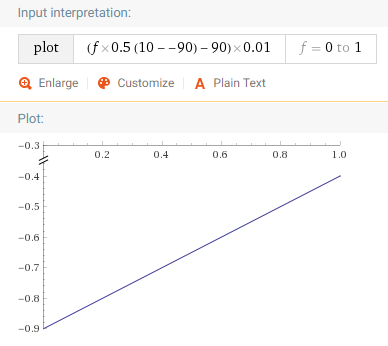
First thing I’d note is that that range on f appears to be incorrect. You need to remove the *0.5 or change the range from 0 to 2. f here is (rc->norm_input() + 1.0f) and given norm_input returns -1 to 1, the range is 0-2.
Some parenthesis in the original code might have made it a bit clearer what was going on (changing a range of -1 to 1 to a range of 0-1).
It would be nice to see a log with the problem happening - particularly it would be nice to see that your RC inputs are meeting the RCn_MIN and RCn_MAX values specified in the parameters.
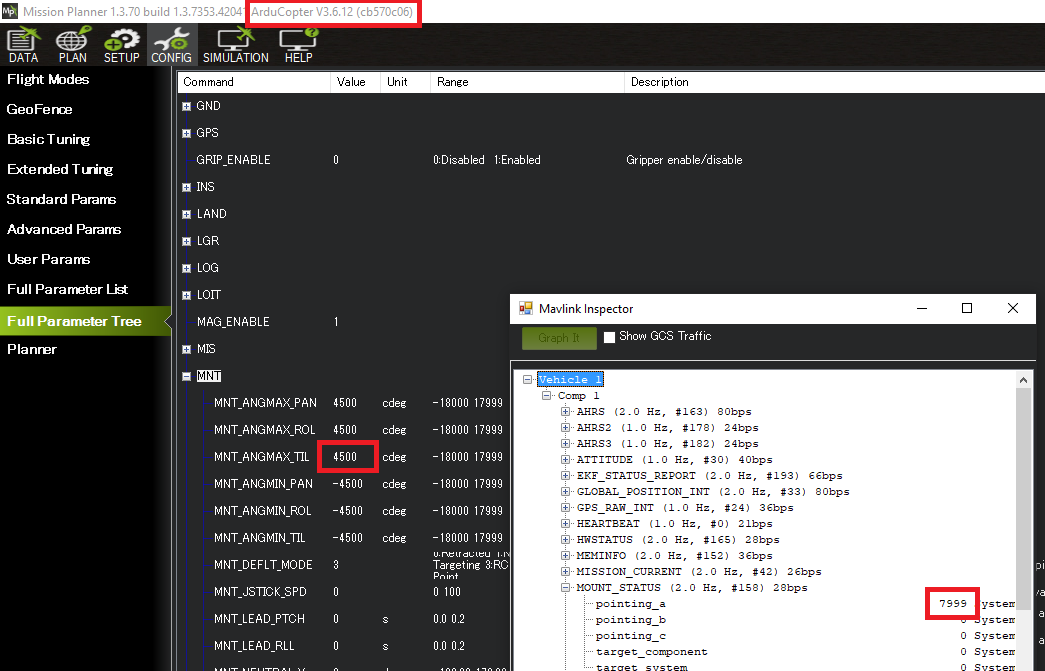
I had a quick look at reproducing this and I think the issue exists in Copter-3.6.12 as well. So not saying that it’s not an issue but just that it’s perhaps not a regression.
In the screen shot below you can see that I’ve got Copter-3.6.12 on the vehicle (a CubeBlack not that it matters) and the MNT_ANGMAX_TIL is set to 45deg but I’ve managed to set the target to 80deg using a mission command
I think I’ve discovered the issue that you’ve hit. It is caused by this PR which had the side effect of adding a requirement that the RCx_TRIM be set correctly. Looking at your logs it seems like the RC7_TRIM is set to the top of the range.
I will likely revert the portion of the above change that added the dependency on the RCx_TRIM value.
I’ve reproduced the issue you were seeing and I’ve created a PR here which removes the reliance on the RCx_TRIM value. This will be peer reviewed and then I expect we can release it with Copter-4.0.4 that should start beta testing in about a month.