I built Plane from master on 4th Feb 2022 and it flew into a tree today, even though it was way outside the geofence. When the plane breached the fence it threw an esoteric error message:
Error: Subsys FAILSAFE_FENCE ECode 4
The log is here:
-
vehicle entered RTL as appropriate when it breached the fence
-
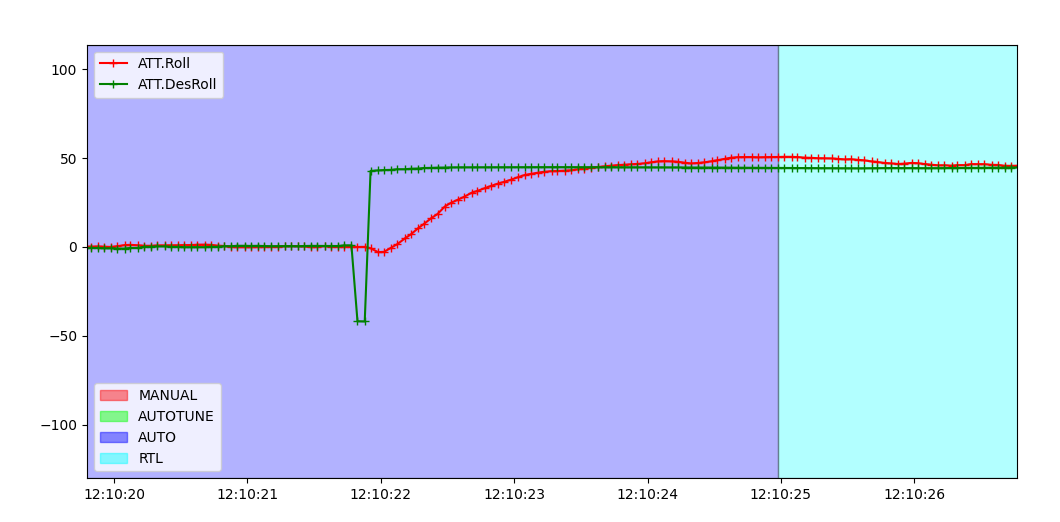
vehicle was rolled to its limit but that was insufficient to keep it within the fence
- suggest increasing the roll limit - at least 6000 centidegrees.
-
it chose to make a right-hand-turn to get back to waypoint 3, contributing to that
-
it hit waypoint 2 immediate it exited takeoff mode - but it could easily have blown past that waypoint
-
until it exits takeoff mode lateral movement is curtailed
-
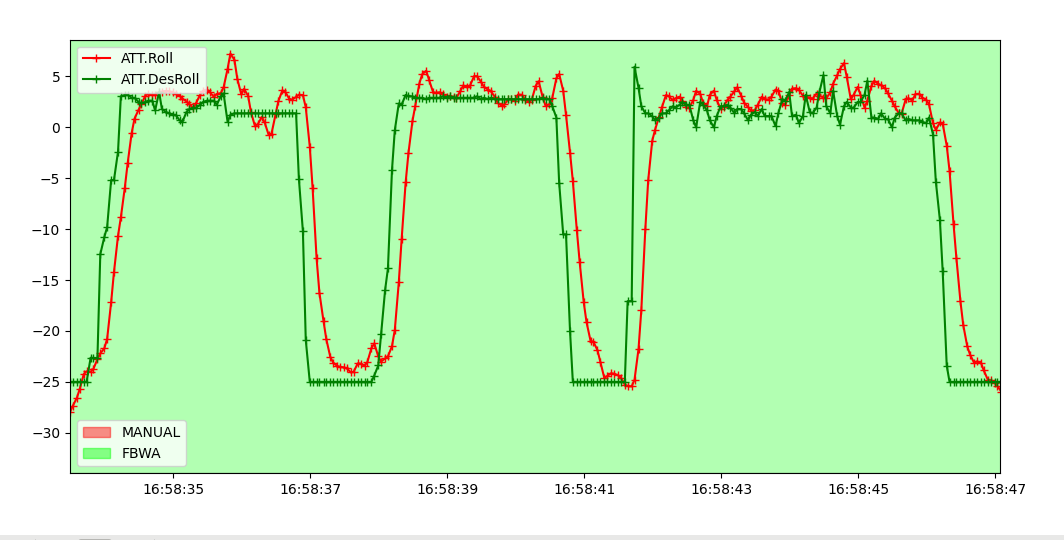
your Bixler can be a lot more aggressive with its tuning:
-
this is my daughter’s Bixler2, for comparison:
-
the error is a little odd, but we also send through data which your GCS can interpret and present nicely. I think it’s also clear that it means you’ve breached the fence…
-
flying above the height of all local trees probably not a bad idea…
-
RC receivers are connected to rescue vehicles when they’ve done something you don’t expect; turning right instead of left might have been one of those cases (I don’t believe the vehicle did anything wrong - it might just have been unexpected).
-
this is filed under “Plane 4.0” for some reason when you’ve clearly stated you built from master

1 Like
Thanks so much for looking at this @peterbarker . I’m still learning so I appreciate your help.
I had fired this up in MavExplorer after the flight and “messages” in MavExplorer doesn’t say that there was a fence breach or that it flipped to RTL. I was used to the previous version where the message would say something like “Fence Breach” and “Started RT:L” - this doesn’t happen in this flight, I just get this weird error message.
What does the error message mean? Is there something wrong with my plane? Have I done something wrong in my configuration? Is it a hardware error? How do I fix this?
It’s useful to know that I could/should have increased the roll limit for this plane, unfortunately it was completely destroyed - but it was a second hand plane I was using to learn, so I don’t mind, just that I can’t make the change and test it. I did rescue the PixRacer, so it will be coming back in another plane - probably an AeroScout.
My goal here is to get the plane to fly inside the zone on my field. Regardless of the trees, the plane broke club rules by flying in that area, and that would have been true if it did it above the trees. Is there a way to force the plane to turn left or right after a waypoint?
I’m pretty sure I didn’t have this problem with 4.1.x (as recently as 4.1.6), my similar missions on stable versions have been able to fly inside the zone no worries.
Sorry about filing under Plane 4.0 - I thought master is “4.2 in progress” - still learning.
:
I @peterbarker I have a new flight with (I think) the latest Beta code. I flashed “Beta” on QGC after @tridge posted that 4.1.7 beta was up, but it still said 4.1.6, so not sure if this is the new, new code. That said.
I got no fence breach failsafe on this flight. Again I got the weird error messages (Error: Subsys FAILSAFE_FENCE ECode 0) when it should have done a fence breach and RTL (set to Breach point in QGC), but despite multiple times trying to failsafe, the plane continued in Auto. It luckily corrected itself before it flew into the trees again (no idea why) and then flew a very nice mission after that until it went out of bounds again - but again didn’t failsafe to RTL.
The first of this second set of errors said ECode 4, the rest said 0.
For reference, this is the same plane, same mission, same weather about 20 minutes later - it was perfect. Dropbox - 2022-02-13-1707.BIN - Simplify your life