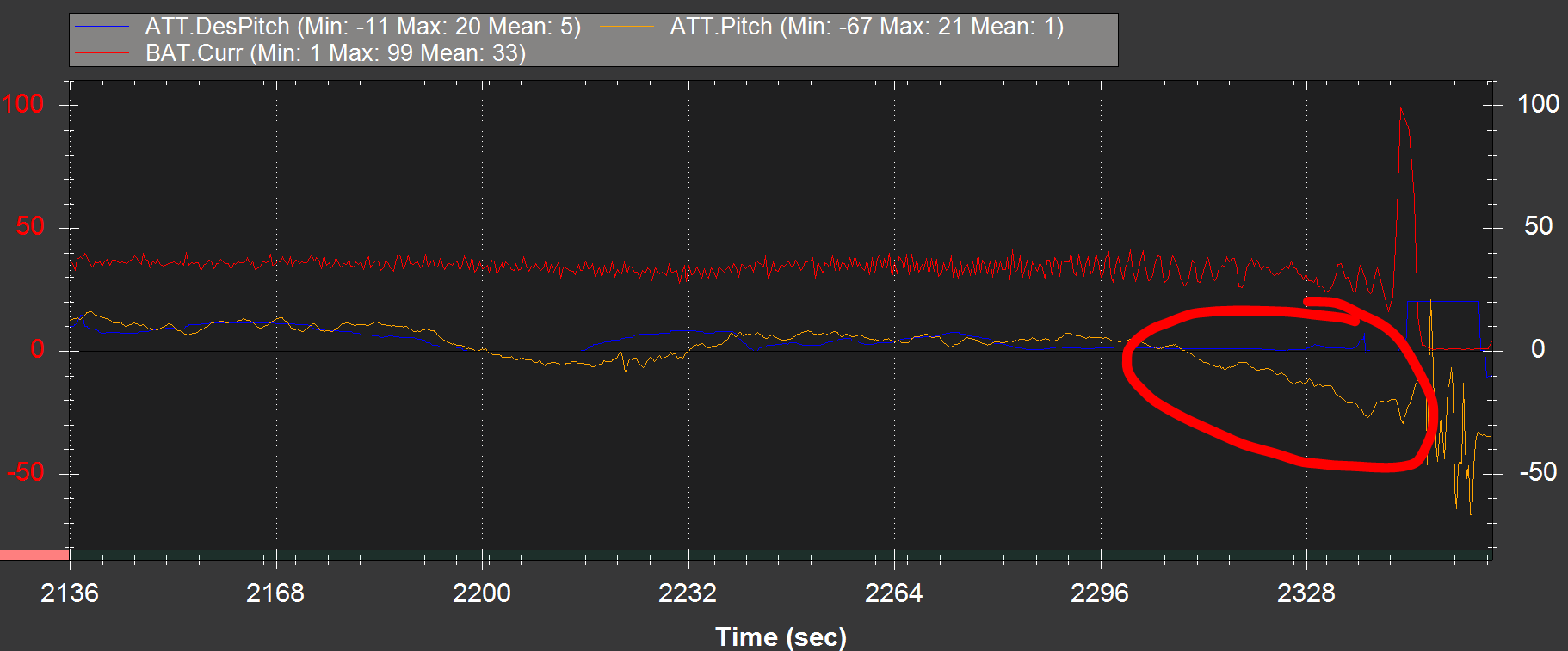
Yes, I agree. That’s the part that Nate circled in red below. It lasted for about 30 seconds.
Yes, full throttle would have helped. Both my 4s 8AH 30C pack and my Mauch PM can handle well over 100 amps. The Mauch PM uses a Hall-Effect sensor so it doesn’t limit the current like the 3DR PM.
1 Like
@GregCovey Not sure if I missed it but did you have an airspeed sensor? It was hard to see in the video since it happened quickly but what was the airspeed just before the right turn? It almost looked like it stalled, causing the pitch down and eventual crash?
Greg, I wrote about the problems I had with my FX-79, when you first posted about your project. Sudden uncommanded dives with nearly no elevator authority to pull up out of the dive. It always happened as soon as the plane got a little bit faster ( I do not have hard numbers). The original prop coming with the plane, is a 12x3.8 Slowfly APC clone (although every shop is now listing a 12x6, the pictures show a slowfly prop shape). This prop with 850kv and 3s gives barely enough pitch speed to keep the FX-79 in the air. There is at least one other guy who had the same problems. He wanted to use the FX-79 for long range inspection flights, if I remember correctly. The problem seems to get worse the heavier the FX-79 gets. He suspected aerolastic effects or a bad aerodynamic layout between the middle section of the wing and the outer sections.
I did not have an AS sensor mounted. In my first graphs that I posted with the video, you can see the GPS speed is healthy even slightly after going into QSTABILIZE mode. As a pilot, I did not feel that it stalled as the speed was up and the turn shallow.
Hi Sebastian,
I did remember your post and I have been thinking about it. I was initially thinking it was an issue with Plane v3.8.4 and did not think that the pilot (me) caused it. However, I do not have an explanation for Nate’s red circled area. It seems like an effect more than the cause.
In the graph,
- ATT is attitude information.
- Pitch is the vehicle’s actual pitch angle in degrees (pitch forward is negative, pitch back is positive)
- DesPitch is the pilot’s desired pitch angle in degrees (pitch forward is negative, pitch back is positive)
The FX-79 does differ from most other wing designs with its large “Buffalo” like hump in the center. I appreciate your comments and welcome others.
Regarding issues with foam airframes at high speeds, I also am experiencing troubles on certain airframes. I suspect that some weak servos are stalling due to the increased forces on control surfaces at high airspeeds. If I were you, I’d troubleshoot with stronger servos first. I still need to get a FPV camera on my bird to make sure that it’s the servos, not some aerodynamic effect causing the loss of control.
Nate,
That’s good advice. I would hope that my HS-65HB 11g servos were up to the task with their stall torque of 25 oz/in. (1.8kg.cm) on 5v, but I will be sure to test them. I could also change the Pixhawk servo rail to 6v for 31 oz/in. (2.2kg.cm) stall torque.
I have the body repaired so its on to replacing some motors. Although the wing hovered nicely in the stiff breeze, and, the transition from hover to forward flight looked good, I am thinking of raising the nose (positive incidence?) a bit when I glue the booms back on. I’ll look at my mini Talon first, to see how it sits during hover. It may be fine as is, which means you want the booms flat against to wing’s flat bottom airfoil.
Greg,
A theory was posted that this unexpected dive some FX-79 owner have experienced is due to wing tip flex. Here’s a youtube video of what one owner found when recorded this situation while trying to investigate the dive cause.
Hi William,
Thanks for posting the video. I had just found that video on the RCG FX-79 thread and was coming here to post it. Great minds thinks alike, huh? 
iforce2d published it in March and he describes exactly what happened to me including when it is likely to happen. On my kmz image, I had just turned into the stiff wind coming back across the field when the FX-79 nosed down until it hit the ground. This is an issue that I would not normally believe…until it happened to me.
Since I have the body repaired, and I am going flying on Monday, I plan to test fly the FX-79 again without the booms and less one of the two 15oz 4s 4AH packs to keep the same CG. It will be lighter so the plan is to get some experience, and perhaps confidence, flying it. We’ll take a video…
Maybe you might want to consider putting the quad motors back, setup QHOVER to test and tune and use that as your fallback / recovery flight mode. Specially considering the nose dive condition is common. In PX4 stack, QHOVER is Altitude Hold whether in MC or FW flight mode and is what I use as my transition flight mode. I normally takeoff in Stabilize then switch to Altitude before transitioning.
Good luck.
Yes, that sounds like a good plan, thanks. We call it FBWB or the preferred CRUISE mode in APM. That is my normal procedure after first testing the basics. Recall it was my maiden flight so I tend to fly without the sensors at first.
Looking at existing videos, the wing seems to fly like a pussycat in low wind when you keep it light so that will be my next test. My future concern is for autonomous mapping flights as a VTOL. The main body frame is very stiff but I have identified two areas in the outer half of the wing that make it flex. One area is the removable portion of the outer wing, It could use a flat carbon bar glued into a slot. The other is where the wing attaches to the main body. That area could use a second carbon tube joiner. So my plan is to stiffen the wing attachments when I glue the quad tubes back on. At least for me, this is fun stuff!
Cheers!
Greg,
I love flying wings and consequently I built a lot of them over the years. My first one was 80" and used an Astro 15 geared, 13x8 prop on 10 3300mah minh cells. Flew beautifully and had no strange handling characterstics. It was based on a Zagi airfoli root and tip.
I had several others that did not fly so well, most notably a tucking (that’s a “t”) behavior at certain speeds. At certain speeds the wing would nose down and pick up speed. As it picked up more speed it pitched downward even more. Lots of up elevator (elevon) could pull it out, but the best way was power down and slow the thing.
I blew one up once when I let it get too fast in a tucking maneuver that it began flapping and came apart.
Best remedy was a forward CG, but I remember on some wings placing the CG forward enough to minimize the tucking also made them hard to land as they did not have enough up elevator authority at slower speeds.
On your test flights try putting the nose slightly down and let it pick up speed and do not move the elevator stick. If it pitches downward on its own then pull up before it picks up too much speed. Maybe you’ll be able to find a good compromise of forward CG and elevator authority. Slow speed elevator control might not be a problem since your landing her as a helicopter anyway.
Good luck,
Paul
Hey Paul,
Words like “Zagi” and “Astro 15” really date us, huh? I still use my Astro Flight Lithium 109 to discharge my LiPo packs.
What you describe is what I saw on my testing below.
After the crash of my maiden flight QuadPlane test, the emerging theory was that the wing will tuck and dive under windy conditions. The tendency to tuck is during higher speed flight into the wind.
The FX-79 Buffalo Wing was tested in 15mph wind as a normal plane. Most of the flight was in Manual Mode but I did try some FBWA mode with good success. In short, the wing flies fine but exhibits a nasty tuck characteristic under certain conditions. The tuck happened many times during my 3-flight testing and I highlighted one on the video.
I am not sure if I want to continue this project as a QuadPlane conversion as I would never feel confident sending the wing out for mapping or long distant autonomous flights. Perhaps at the very least, I may try to reduce the wing wobble as described above.
Also tested in the same conditions were my Senior Telemaster, Ranger EX, and mini Talon QP. None of these planes had flight characteristic issues.
Greg, I havent put hands on the FX79 - is there room in the outer wing to
add another spar?
I have a couple Z84 wings and they flex a lot. I put 1 layer of glass or
carbon cloth on the wing section joints, like 2 inches on either side of
the joint to make it stiff enough.
Hi Ted,
Yes, I think there is room. My plan was to add both a flat carbon spar and second tube joiner to each wing extension.
it’s back to the original Ranger EX plan for me.
That’s a shame but that about confirms the bad habits I read about this aircraft. That’s why my research then pointed to and opted for the RVJet instead. I’ve actually started another VTOL conversion build and will soon post the development.
Anyway, hopefully the mods will take care of the tuck issue.
Good luck.
With the booms and single Lipo pack removed from the FX-79, I had dropped 39oz (2.4lb)(1.1kg) and it still would tuck under certain conditions flying into the wind. Each boom, motor, and prop weighed 12oz. One of the Nano-Tech 4s, 4AH, 30C packs weighed 15oz. In addition to that extra weight, I wanted to add a camera and gimbal.
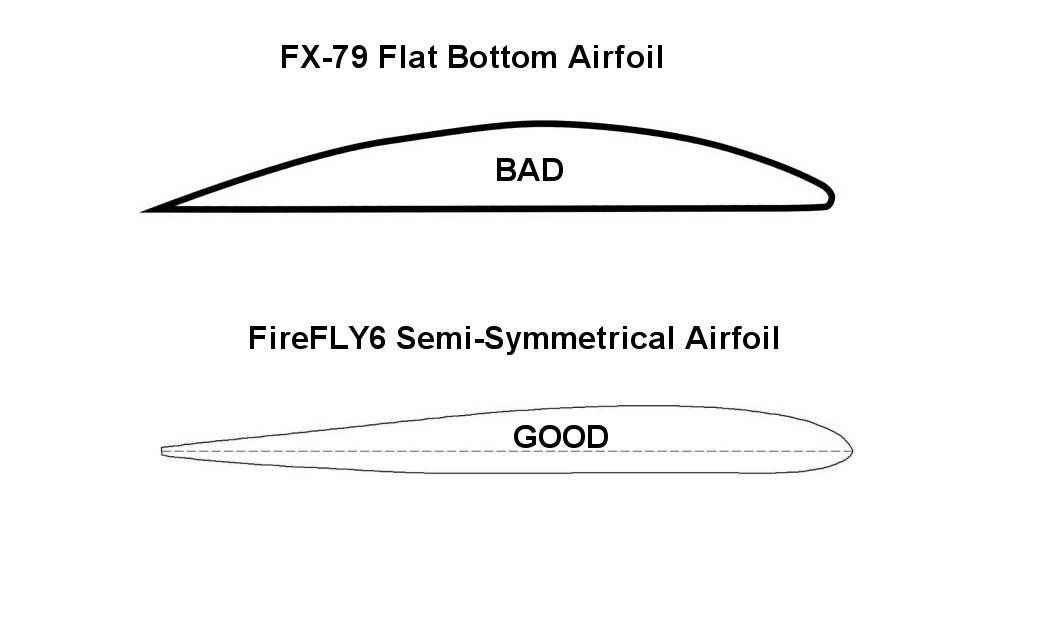
I then did some reading and discovered that the flat bottom airfoil, which I really liked to mount my booms on, is close to the worse imaginable for a flying wing. It is the root of the problem. I checked out the Zagi wing and my FireFLY6 wing and they are both semi-symmetrical airfoils. So it seems that reducing the wobble in the wing tip is less critical than introducing washout or reflex or adding some airfoil curve to the bottom side to help cancel out the pitching moment.
1 Like
Greg,
If you set up FX79’s CG to be nose heavy, and compensate with a good amount of up elevon, it may reduce the tucking behavior - at the expense of added drag.
Paul