I need to find where the data of all functions (from throttle to pitch) all the data
This file should definitely be and I want to change it (do not even think to dissuade me) ( just tell me where it is and how to open it)
I know what a Parameter Tree is(there are no functions that should be there)
Where do I find the setting for the throttle function on the right? It’s not there!
Where do I find the setting for just the throttle (I mean how it converts the values coming from the 3Rc channel)?
Like your other posts your questions are far from clear. I do not know what you are asking. Perhaps it’s the Servo Output Screen you are looking for. If you step your way thru the Rover Documentation you should be able to configure the vehicle.
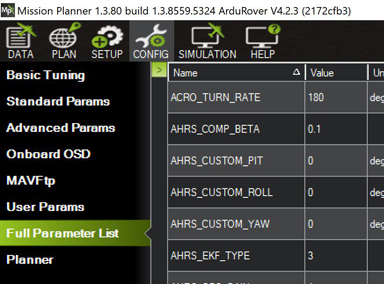
And, every single parameters is listed in the Full parameters list. Why don’t you post the parameter file?
Okay, yes, I read the wiki for Rover. In it I lack information which Rc channel is responsible for this function, as well as how can I change throttle right
Throttle Left and Throttle right in the context above are outputs to skid steer motors. You can use various RC control schemes to control it. The most popular way is on a Mode2 radio (throttle and ruder on left stick) is with the left stick up/down for throttle (center neutral) and the left stick L/R for steering.
Read this. Note that Paddle steering is not common: Steering Input
Thank you so much, sorry if the posts above may have seemed rude. can you help me with something else afterwards?
I have problems with the throttle, too.Pixhawk does not see the 3RC channel if the output is assigned to the throttle (and if you just assign rcin3 everything will work)(P.S Pixhawk itself sees the 3 rc channel)