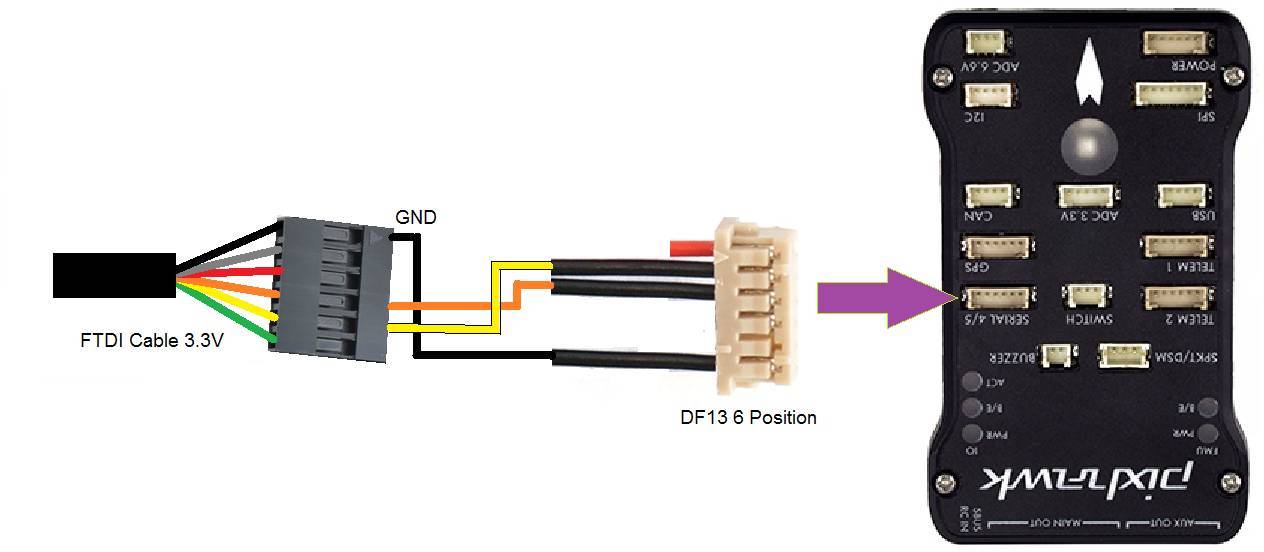
According to the picture and compared with the schematics, the FTDI-Cable is hooked up like this which would be completely wrong:
GND-------------GND (OK)
Serial4TX------RX (???)
Serial4RX-----TX (???)
SERIAL 4/5 port - due to space constraints two ports are on one connector.
Pin Signal Volt
1 (red) VCC +5V
2 (blk) TX (#4) +3.3V
3 (blk) RX (#4) +3.3V
4 (blk) TX (#5) +3.3V
5 (blk) RX (#5) +3.3V
6 (blk) GND GND
Pin 1 is inside eg. +5v and GND is close to the edge of the board. For hooking up FTDI cable, use TX/RX and GND pins. For TX/RX pins it does not matter which way you put them, you won’t break anything. If you have them wrong way you just don’t get any data and in this case just swap TX/RX pins and you should start to get data flowing.
Easiest it is to test with Terminal software or similar. In generally TX output goes to RX input and vise versa.
Black/Red is referred on the original cables as red is always where +5v is.
Thank you. It works now.
I thought I need to connect RX with RX and TX with TX but this is wrong. So I connected RX with TX and TX with RX and now it works.