Hi,
I just hovered a little in my livingroom to get some skills as this is my first copter.
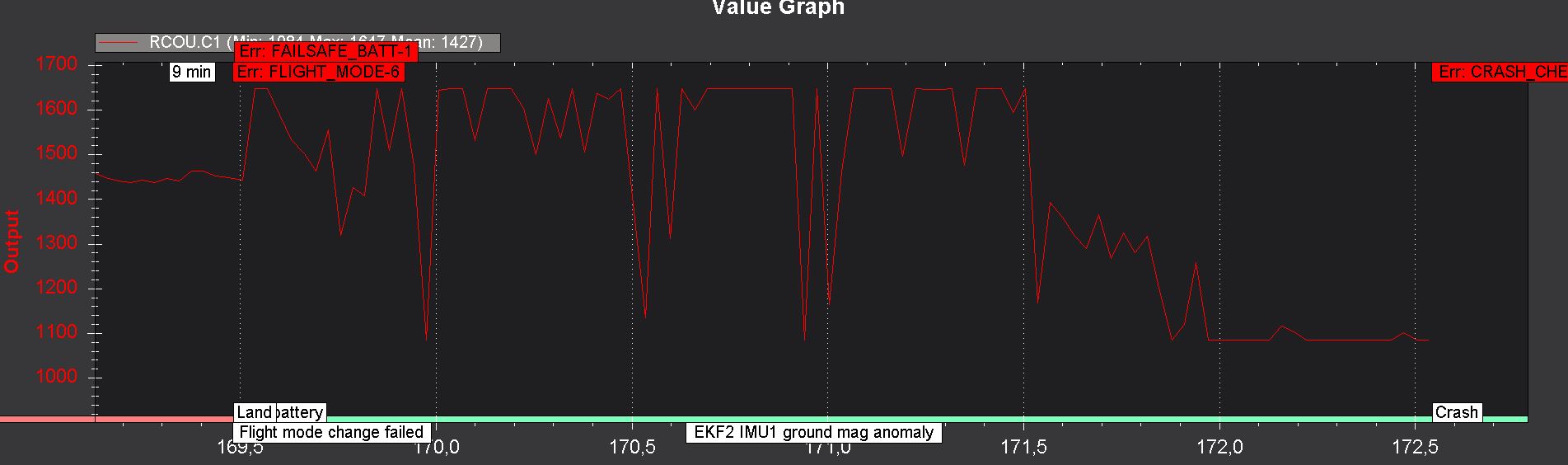
Yesterday when FS_BATT engaged I could land the copter normaly.
Today it suddenly throttle up and crashed into the ceiling.
Is someone able to see what went wrong from my log of today? Log
As I wrote I was testing in my livingroom, so there should be no GPS Lock if I am not mistaken.
And the copter was not 2m away from launch. Anyway whithout GPS it couldn’t say if it was.
From Wiki:
“Return-to-Launch (RTL) if the FS_BATT_ENABLE param is set to “2” (“RTL”) OR the vehicle is in AUTO mode, has a GPS lock and are at least 2 meters from your home position”
And it even said “Flight Mode Change failed”
So why it should throttle up?