I am wondering if there is some type of documentation out there showing FrkySky radio proper INPUTS and Mixer settings for HORUS or Taranis or any other radio running OpenTx.
My setup for the flying wing is as follows:
PIXHAWK: Pin 1 to Right Aileron Servo. Pin 2 to left Aileron and Pin 3 to Motor ESC.
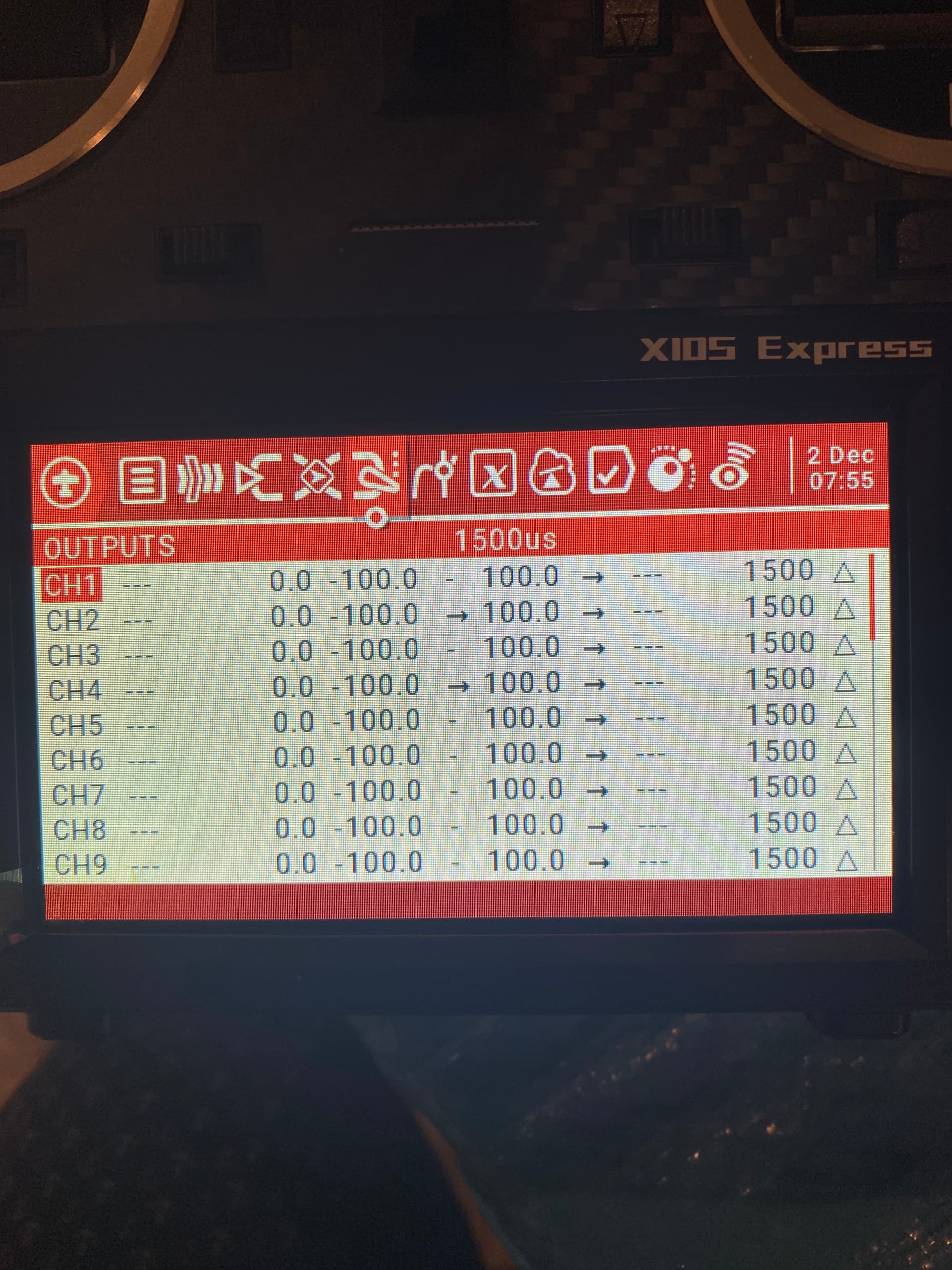
Inside Mission Planner Servo Outputs are set as follows:

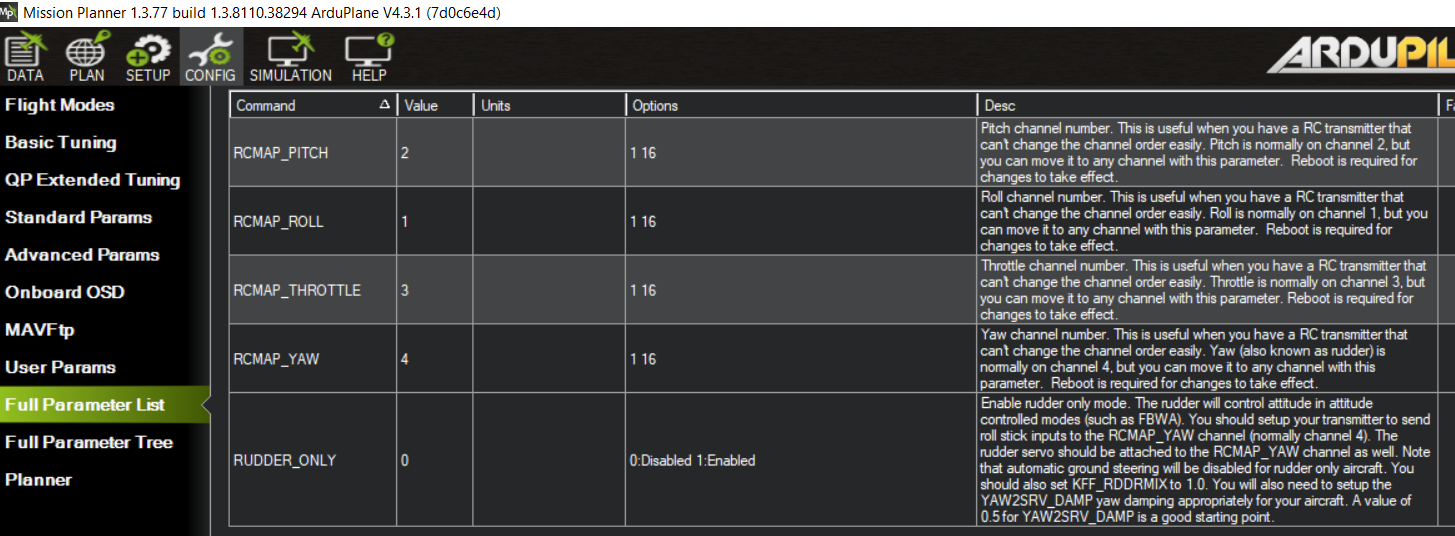
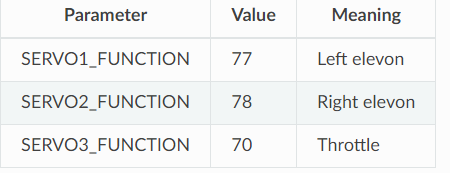
Parameter Settings are as follows:
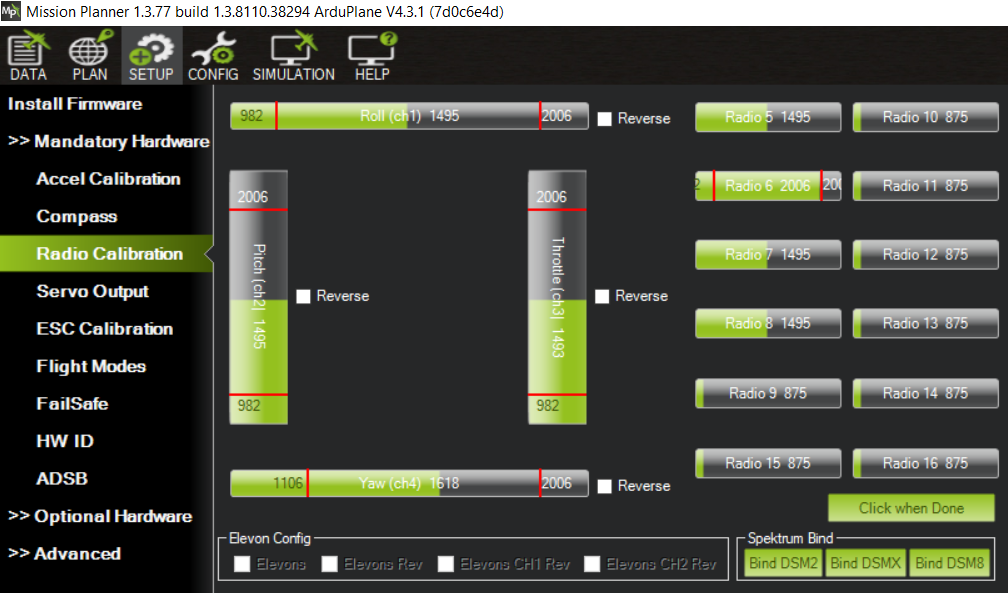
Radio Inputs are calibrated
HORUS X10S radio Settings are:
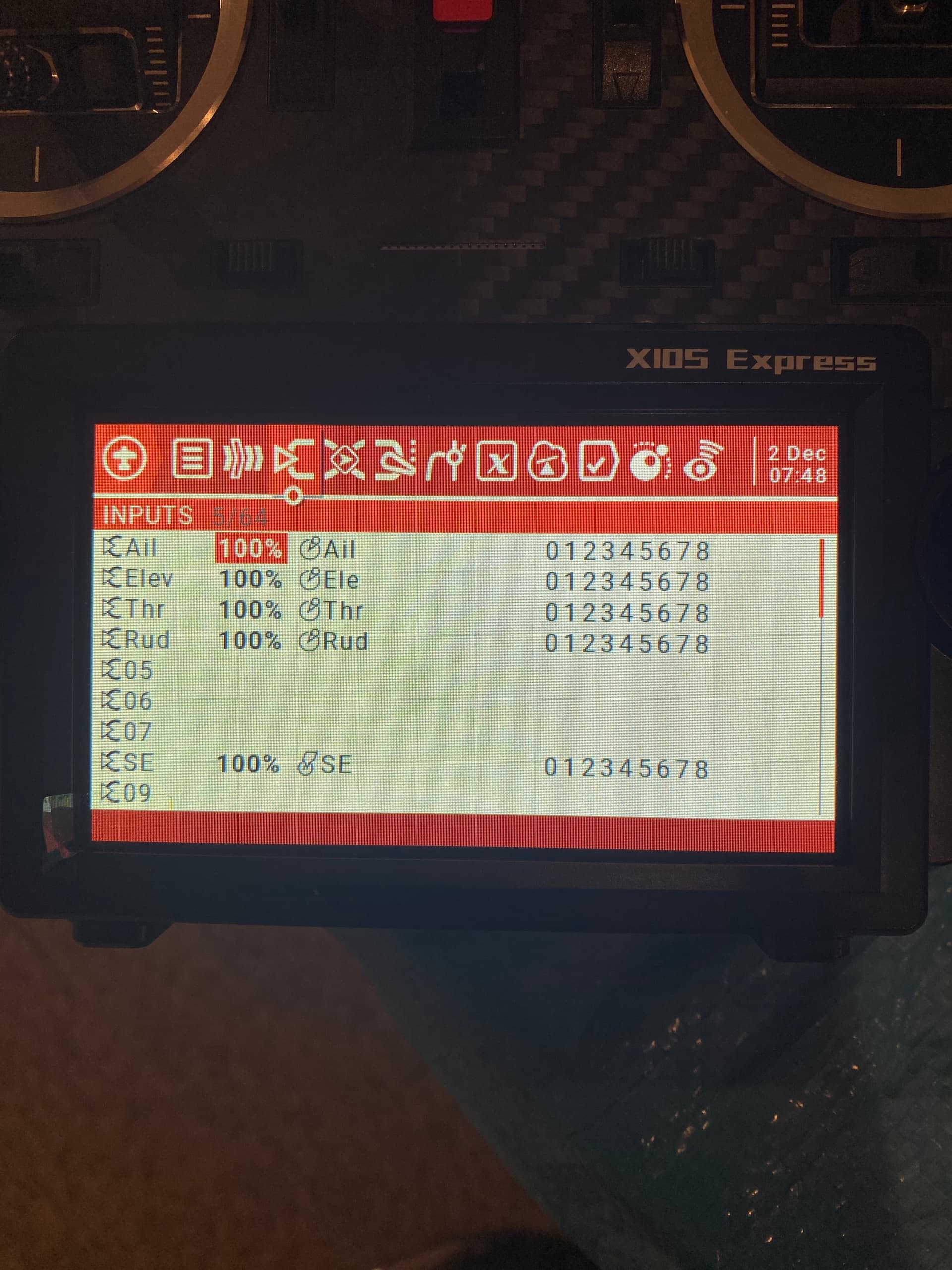
INPUTS
Ch 1: 100% AIL
Ch 2: 100% Ele
Ch 3: 100% Thr
Ch 4: 100% Rud
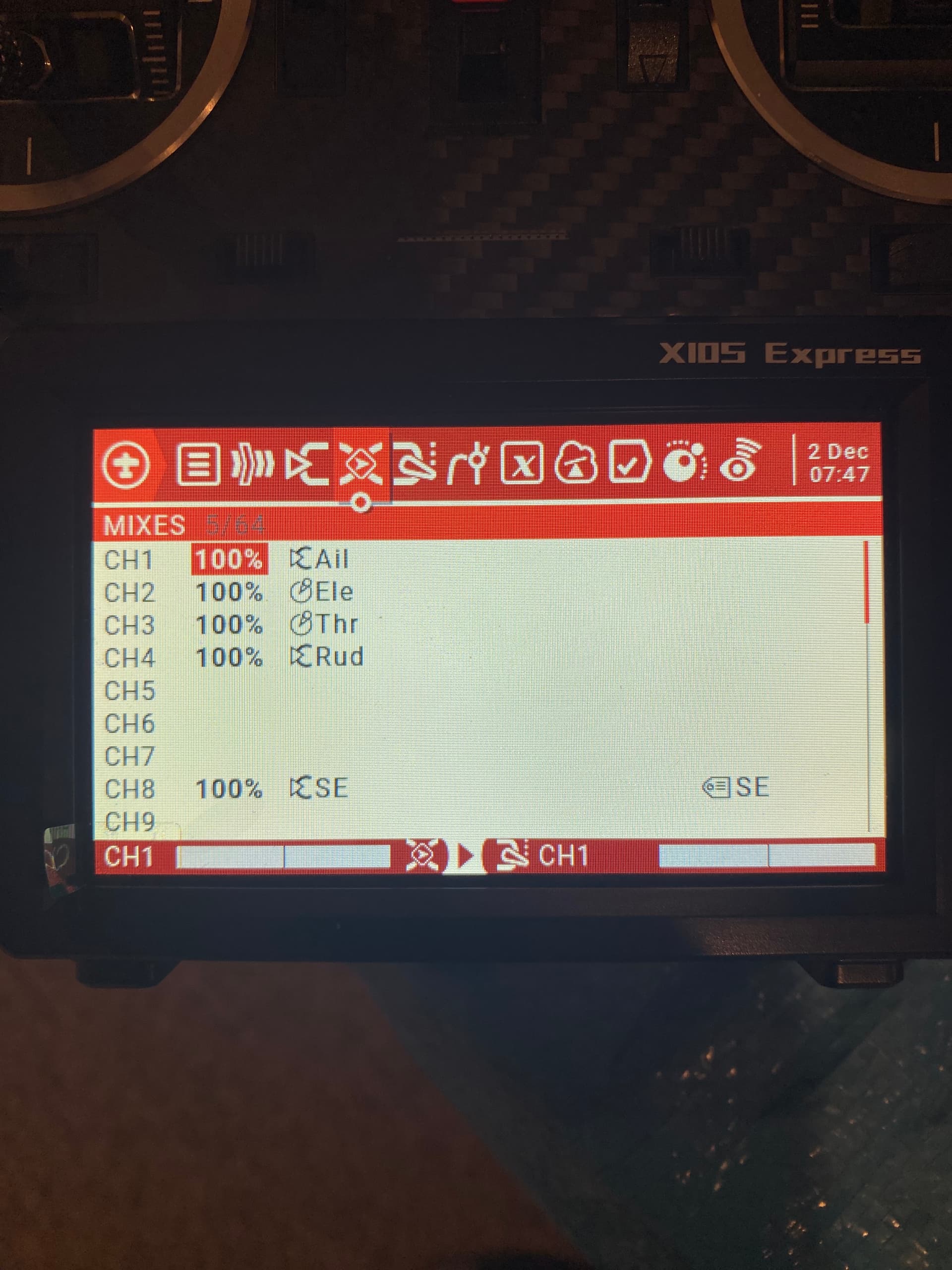
MIXES
Ch 1: 100% AIL
Ch 2: 100% Ele
Ch 3: 100% Thr
Ch 4: 100% Rud
I just can’t remember exactly what I have to change in Mixes to make this to work.
At this if I move any of the sticks (in FBW Mode), the throttle is making left Aileron to go up and down. None of the other radio sticks do anything to the wing.
What am I doing wrong?
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
SOLUTION
I figured out what the problem was.
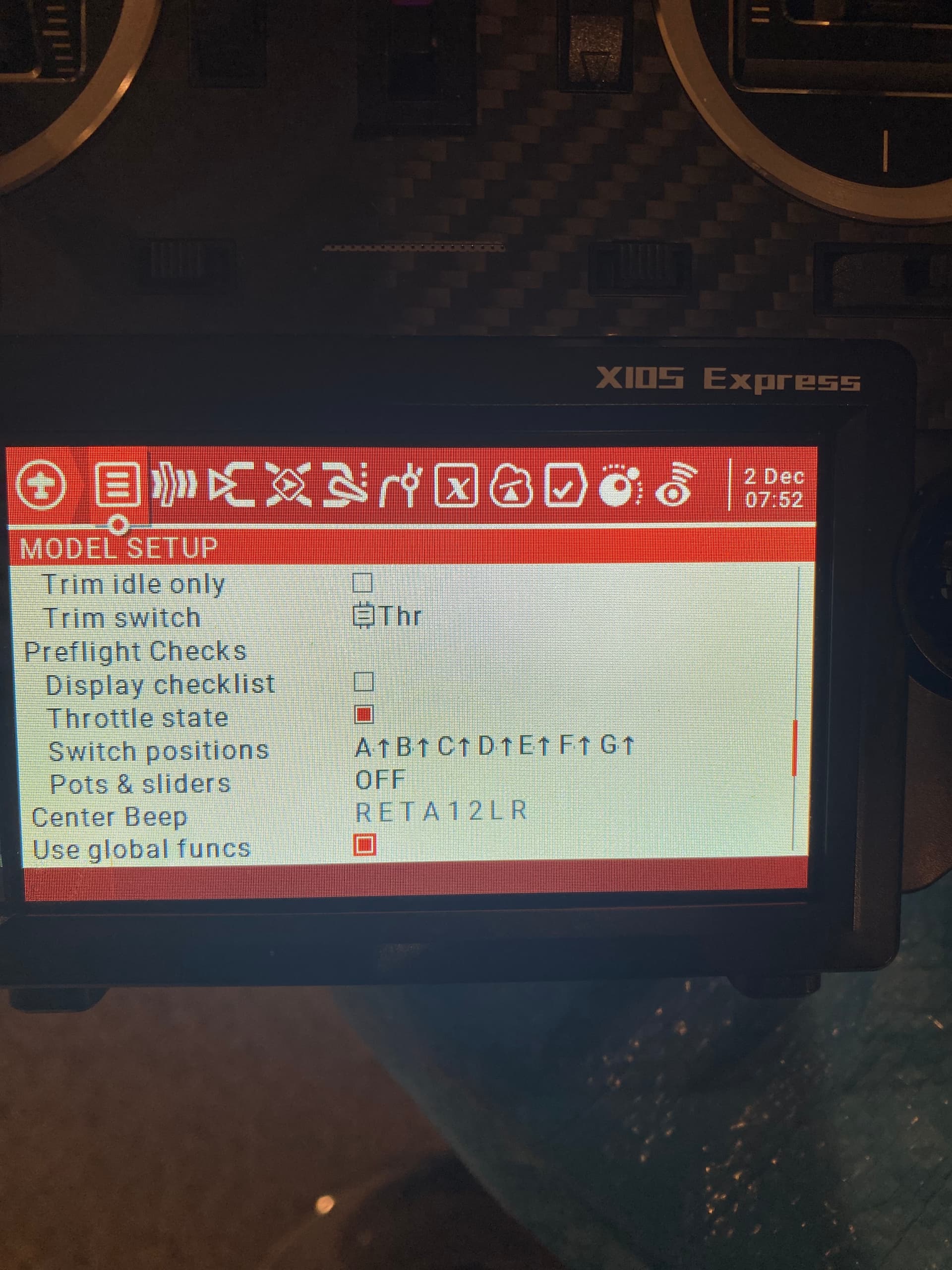
- Some how my radio (tx) switched to Mode 1 instead of Mode 2. So I fixed that. This is the reason all channels inside the Mission planner were acting weird.
- Changed wing wiring from Left Aileron to Pin 1 on Pix hawk, Right Aileron to Pin 2 and throttle 3.
- Followed Ardupilot instruction to the teeth as listed here.
https://ardupilot.org/plane/docs/guide-elevon-plane.html
- Change every parameter values as explained in the wiki above.
- Inside mission planner, only change “Pitch” channel to reverse inside “radio calibration” as shown below.
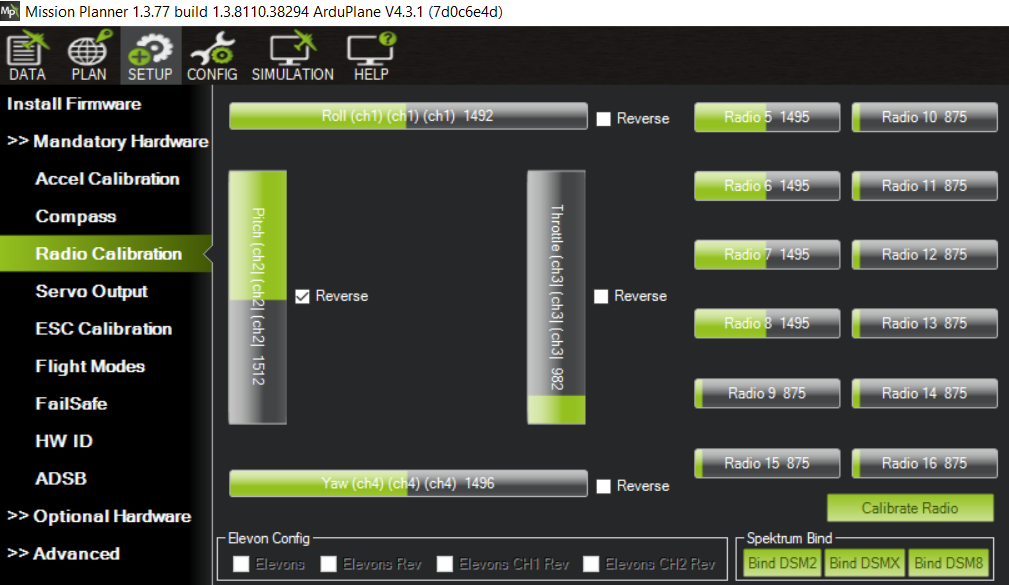
and that’s it. Everything will work perfectly.
As far as Radio Inputs and Mixes setting, what I posted above will work just fine.
I also figured out how to use two switches get 6 flight modes using a combination of two switches. Anyone interested in learning how to do 6 flight modes combo, ping me and I will post the instructions. Here are some screen shots.