Did you update the R9mm FW to have the F.Port?
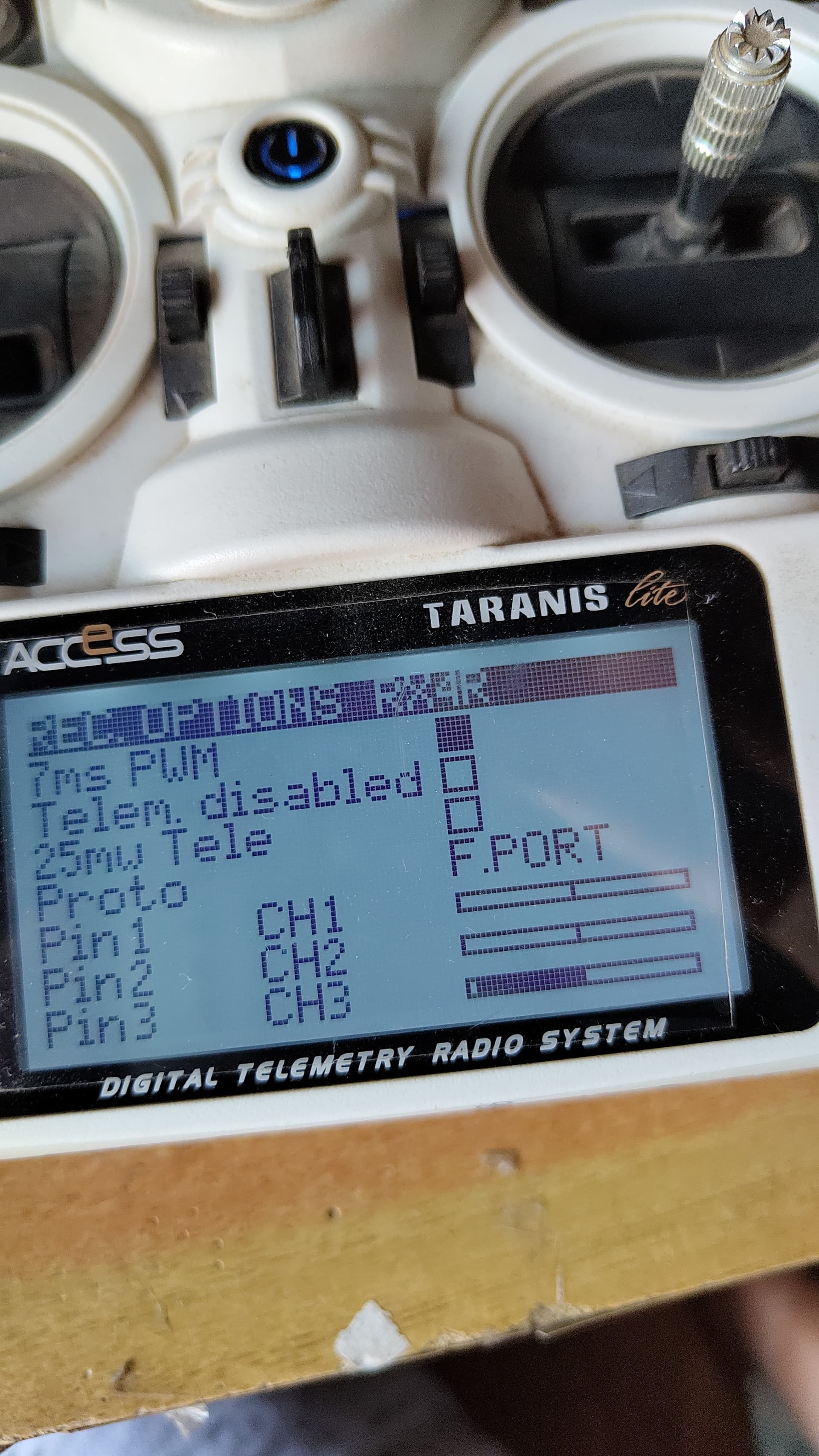
You also need to change from S.Port into F.Port in the transmiter menu.
You need to connect to TX6 with BOARD_OPTIONS=1, assuming you’re using a Matek H743.
See my post immediately above yours for a working config on a Matek H743.
I have a suspicion the issue is with receiver itself. RXSR seems to be the culprit.
Hi all,
Tried the R-XSR as well with ACCST protocol but I’m not getting telemetry.
If I’m changing the SERIAL7_PROTOCOL to 4 (Frsky Sport), I’m getting 12 sensors telemetry but no RC control.
Trying frsky rx4r reciver fport could not work
Radio taranis x9 lite both 2.1.0 firmware
Fc : Skystars H7 HD — Copter documentation
Reciver sport pin flight control mount t1
for fport.param (24.2 KB)
@tridge
Try 4 for the Options instead of 7. This depends on whether it’s coming from an inverted or non-inverted port.
1 Like
H743WING ETHOS X20S R9slim+access fw1.3.2 connection FPORT–TX6 Telemetry is gps only yapuu cannot work!
- BRD_ALT_CONFIG=0
- SERIAL7_PROTOCOL=23
- SERIAL7_OPTIONS=7
- RC_OPTIONS=0/8
- RSSI_TYPE=3
Have you solved your problem? I’m the same as you! Same hardware! All right, tell me thank you, friend
Hello,
No, I’ve replaced the receiver to 2.4GHz.
The tandem receiver is also working.
Thank you
Rotem
- Congratulations on your success. I set it according to your parameters be unable to work
ethos issue.
Hello.
My config is:
- FC Matek H743 with ArduPilot 4.3.7 Copter;
- receiver FRSky Archer RS with latest FW;
- FPort connection is used;
- in Mission Planner ‘rxrssi’ output is used, RSSI_TYPE=3.
I could’t get actual RSSI reading in Mission Planner - it displays ‘99’ constant when the receiver is connected, and zero when it isn’t.
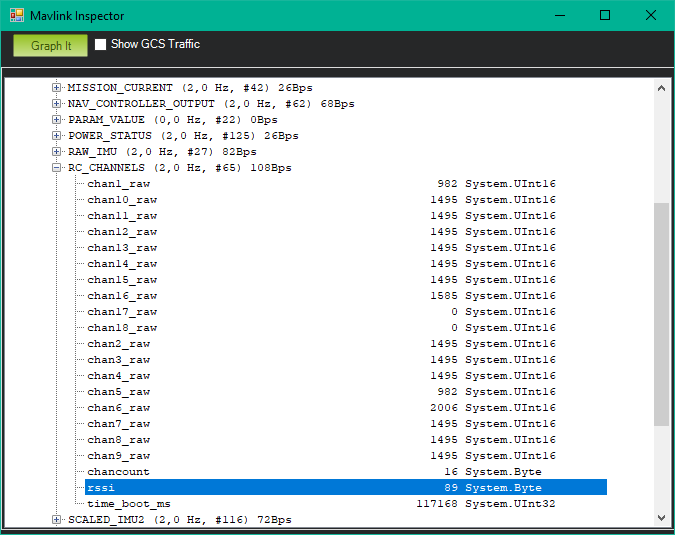
I checked RC_CHANNELS node in Mavlink Inspector and saw that the actual RSSI is transferred via ‘chan16_raw’ value, but ‘rssi’ value is always 254 constant.
So I’ve supposed there is something wrong with built-in RSSI scaling…changed AP_RCProtocol_FPort.cpp to remove it (const uint8_t scaled_rssi = frame.control.rssi;), built myself a custom arducopter-heli.hex, flashed it, and got real RSSI in Mavlink Inspector!
Now I see the same RSSI values in my radio and Mavlink Inspector, i.e. scaling factor in my case should be 255/100=2.55, not 5.1.
So I would suggest to make RSSI scaling factor for FPort configurable.
Hello Ardu heroes,
Has anyone sort out the fport issue on speedybee f405 wing ?
Damm it’s very confusing in the manual. Not sure what the hack they talking about, SBUs passed to rx2. The tx and rx 2 3 4 are not pinout, it’s jack connector. I did cut the cable and make standard servo type pinouts and did everything I could think off, but it’s not working.
On Matek f4 it works and off course on Matek F7 it works easy piggy.
Using frsky r9 mini if anyone has tried on any other model do leave the settings and uart port.
@tridge / @Yuri_Rage do you have any idea what the following could be?
SpeedyBee F405 Wing, FrSky TW R6 RX. I want to feed the FC with F.Port. This works fine via a bidirectional inverter if the TW R6 is configured to F.Port (TX1/RX1 on the SpeedyBee). All telemetry information from the FC is received and the Yaapu script is running.
However, the TW R6 also has an inverted S.Port / F.Port output. If I take this without the external inverter and go to TX1 with half duplex (SERIAL1_OPTIONS = 4), only GPS is found as a telemetry value from the fc, the Yaapu script does not run.
Is there a problem with Ardupilot (4.4.2) and Half Duplex F.Port?
Seems to be a problem with the TW R6 (twin). Everything works with a TD R6 (tandem).
Maybe my feedback doesn’t speak for itself because I am testing on a F405 target I created for Ardupilot, but with Rotorflight there is no such problem with the same hardware, wiring and connections.
Systematically after less than a minute the rx in fport, an R-XSR in ACCESS, stops communicating, of course also the telemetry on the Yaapu as well.
I have to re-power it to get it working again.
I have tried any combination in the SERIAL OPTION but the problem is systematic.
If I leave the tx off exactly the same thing happens, it is the FC that arbitrarily decides after a while to stop talking to us on SERIAL4 (in my case), so if I then turn on the tx obviously doesn’t work.
PWM set at 4 uS on the rx also gives no positive effect.
Tested with the master compiled today, so Ardupilot V4.5DEV.