Hi, this is not supported ATM, ardupilot cannot be a master on the SPort bus, a receiver is always needed. FRSky sensor can be chained on the sport bus along ardupilot but ardupilot cannot use them, like @Simon_Exner said ArduPilot acts as a slave.
Thanks for confirming!
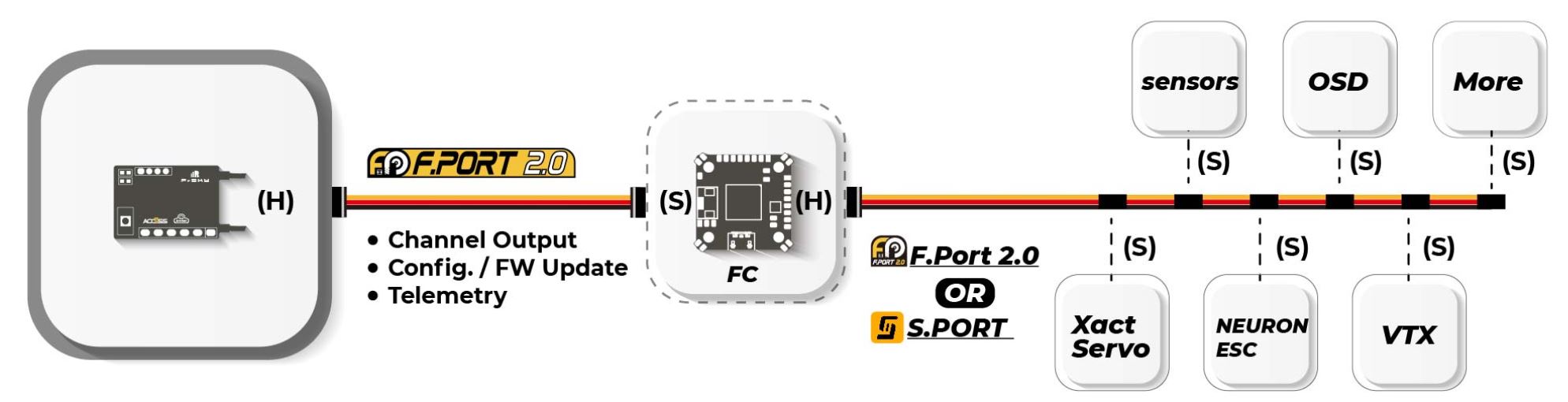
As I am using an r9m which has the same pin for f port and s port , does this now mean I cant chain the sensors as I am using F port ?
So I need to go back to the old way of Sbus and s port ?
Thanks
Yes, fport does not support chaining. Fport2 does
Yes I am on Fport 1 and ACCST.
Thanks for the help.
Sorry, created a new post, should’ve put it here…
I am in the middle of a new build and was trying to give F>Port a go. So, I have r-xsr flashed with fport accst firmware, updated my Taranis with latest OpenTX, flashed internal module, hooked it all up according to instructions:
BRD_ALT_CONFIG=1
SERIAL7_PROTOCOL=23
SERIAL7_OPTIONS=15
RC_OPTIONS=8 (did not work at all without it)
RSSI_TYPE=3
The thing is, I can’t get telemetry consistent. I can discover GPS sensor for a sec, as well as YAAPU script responds for a sec, then nothing. If I hold bind button on RX, it switches to whatever other mode and I lose control (no movement reported on TX calibration page) but telemetry goes for a second again and stops. I hold bind button again, blue light comes on on rx, I regain control, telemetry turns on again but again only for a second or so.
Using Arduplane 4.1 dev (latest)
So, I have reverted back to SBUS and smart port telemetry, and it works fine.
Is FPort broken or am I missing something here?
I have Fport working on a Matek H743 with the same configuration you have except for RC_OPTIONS (not needed). It’s an R9mm-OTA with ACCST Fport but that shouldn’t make any difference. Another with a Kakute F7 Mini with similar config. So, not broken. Using Arducopter 4.1.0-dev.
Hello Tridge,
I heard F405wing can be Fport without inverter if there is invert signal output from the receiver. it is true? how can i set it up? my receiver are R9MM and R9slim+
You will have to use “inverted S port” pad of R9MM to make FPort work with F4 boards without inverter.
I followed the Fport setup. but it did not work. I just could not figure out what did I miss. neither F765wing and F405wing. is it possible to have video tutorial to look at? or something that i can refer to one step by another? thank you for your help
@Anton_Khrapov
I had a similar situation where i spent full 2 weekend days and ended up finding a simple issue. It was RSSI. Yaapu script will not work if there is no RSSI in the mavlink stream(assuming you are using Mav2PT converter).
Just to try, setup RSSI as 1 (analog) even if you don’t have anything connected to analog pin. Just a test and see if you get Yaapu script working.
Try
SERIAL1_PROTOCOL = 23
SERIAL1_OPTIONS=7
Also make sure your R9mm receiver is flashed with FPORT firmware.
1 Like
The most important step ![]()
Which FC you mean?
For the F405wing here is what I did
F4 based autopilots using an “inverted FPort” output from the receiver can connect it to any UART’s TX pin with the configuration:
SERIAL7_PROTOCOL =23
SERIAL7_OPTIONS = 4 (Half Duplex)
RSSI_TYPE =3
RC_OPTIONS = 8 (either =0 tried both)
BRD_ALT_CONFIG =1
Uart1 TX to the r9mm receiver
For the F765wing
BRD_ALT_CONFIG =1
SERIAL7_PROTOCOL =23
SERIAL7_OPTIONS =15
RC_OPTIONS =8 (either =0 tried both)
RSSI_TYPE =3
Uart6 TX to the r9slim+ receiver
neither of the FC works for me. I don;'t know what I miss.
I meant F405 board.One more thing.You must run the latest version of Arduplane.Not sure if Fport has made to the stable yet.
I used SERIALxx_OPTIONS=7 on my omnibus F4 board thou.
Try serialxx options=7, protocol=23, rssi_type=3
and make sure that no other uart has serialiN_protocol=23 or 10
Also make sure you connect signal wire from r9mm to the TX pin of your FC. Serial options 7 is to swap Tx with Rx I think.
Make sure that no other serial is set to S.Port or something alike.
1 Like
I think I just followed the instruction without further thinking. Both of my receiver output inverted signal. So it doesn’t need to invert again… Now everything is fine now. Thanks for your help.
serial_option=Half duplex.
No need to invert.
This is what I did wrong.