You have done the frsky and opentx community and many others a great service by building and keep your lua’s scripts up to date.
Your new release works perfect, with my xlite and r9 slim+ota, using f-port and access protocols.
You have done the frsky and opentx community and many others a great service by building and keep your lua’s scripts up to date.
Your new release works perfect, with my xlite and r9 slim+ota, using f-port and access protocols.
I just stumbled across this (rather late, I know) - would there be any chance to make this work with CRSF as well? Or did I maybe overlook any other script that already provides these very useful GCS functions on the transmitter for Crossfire users?
Hi, the standard crossfire lua script can do parameter editing, the available parameter list is shared with the OSD https://ardupilot.org/copter/docs/common-paramosd.html
I know, but using 1MB boards only so far, I can’t access the OSD based parameter menu, therefore no way to customize the slots the easy way (by sticks). Also it seems the screens of this script can hold more parameters, and they also look much more appealing.  Getting notified of GCS messages at the same time is also really neat.
Getting notified of GCS messages at the same time is also really neat.
Hi, well yes LuaGCS on CRSF would provide added benefits but would also require a fair amount of coding. Anyway to customize the OSD parameters you dont need stick gestures but rather mavproxy as explained in the wiki https://ardupilot.org/plane/docs/common-paramosd.html#populating-a-screen-s-parameter-slots-using-mavproxy-s-osd-module
Yes I know, that’s why I wrote ‘the easy way’ - I’m not that much of a command line freak. But if a situation should arise where I absolutely need it, I know how to do it, thanks!
Hello Alex,
I just found this lua GCS. it is so amazing. thank you so much.
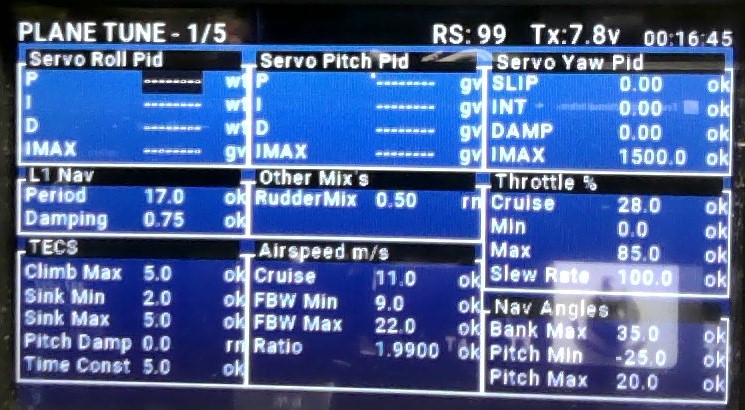
I have some question I would like to ask you. why my roll and pitch PID part not showing and all the rest are all showing correctly. and it keep telling WRN Param read failed.
which plane version? Plane PIDS parameters have changed
If you’re asking ardupilot. It is the latest.4.2dev
ok, then seems you’re using an older FrskyLUAGCS, should be 1.0.3
Yes, you’re right. It is working now.
One more thing to check. When I change the tune_param it did not change to the actual plane
I don’t understand your issue sorry? A little more details?
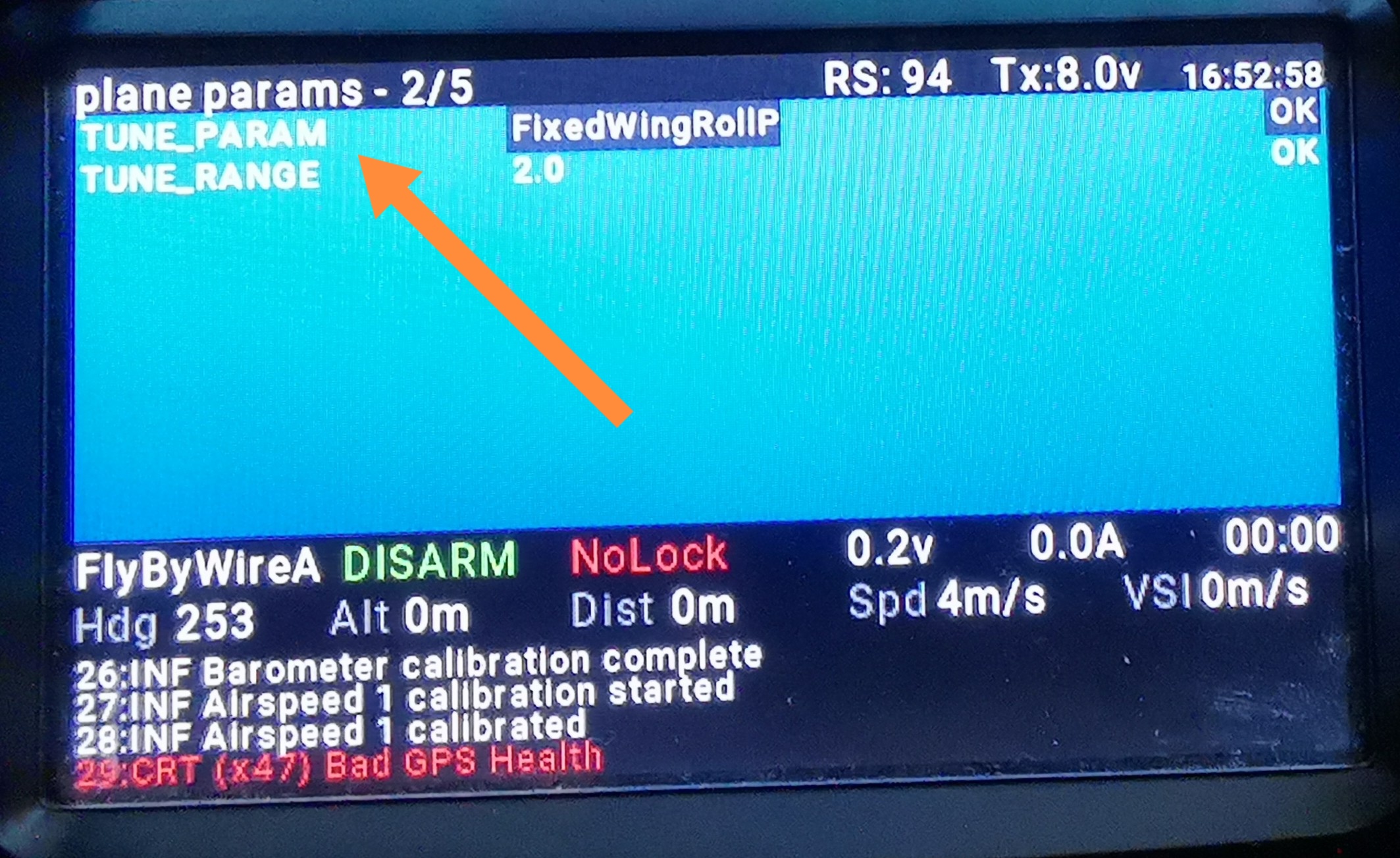
The second page of the luagcs. It is the plane params. You can choose fixedwing roll PID or pitch PID. As I have assigned one channel for tune_chan and another for the tune_selector.I assume I can change the number for tuning the PID by this page setting. can you tell me if I got it wrong.
a screenshot please, I still don’t understand 
yes that should change the TUNE_PARAM value, did you check with mission planner if it was changed? if you get OK I assume so
I just checked the Mission planner. the Config page of the full param list shows the PID can be switched. but the osd from VTX still shows no change. when I turn the knob from the radio. the voice from the mission planner still tells the param did not change. and it will be changed after another bootup. is it supposed to be turn one param at one time or it can be turned with all the P I D FF at one time flying?
Hi, I’m not sure why this thread ended in 2021, but I hope someone can respond to the question, does the GCS script work with Ardupilot-based FC and ELRS transmitter/receiver?
nope, it only works with frsky based telemetry