I don’t think this is a bug, so the busy developers can ignore…
But, I’d appreciate some advice.
My flight controller frequently switches the compass it’s using… Is this normal?
I had no issues… Copter flew great! I moved around in loiter or pos_hold for a while, and it was stable and predictable.
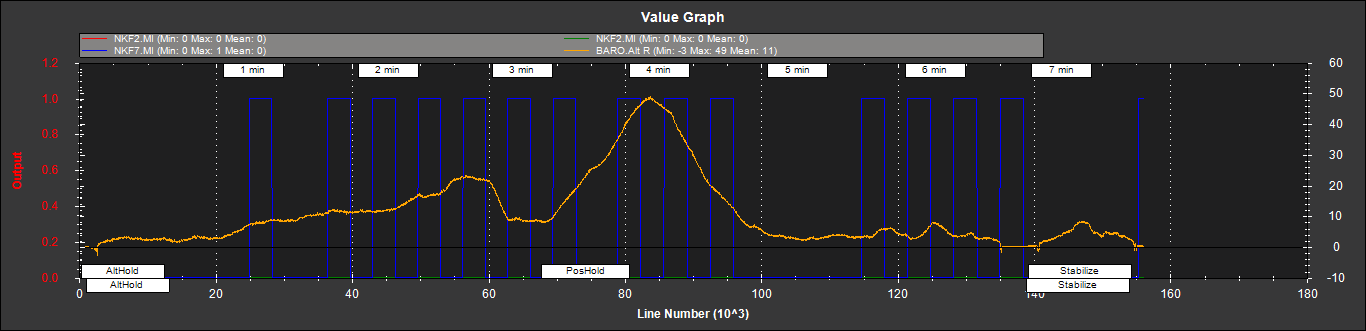
–Sorry, I just noticed the blue line is difficult to see… at least on my monitor… But the blue line is the mag switching. I added the altitude to see if it was related to that, but it doesn’t appear to be.
I logged in to see if i had any replies, and my image seems to have disappeared.
So, here’s the graph again.
I’m still wondering if this is OK or something I should be concerned with… What causes the FC to decide to switch?
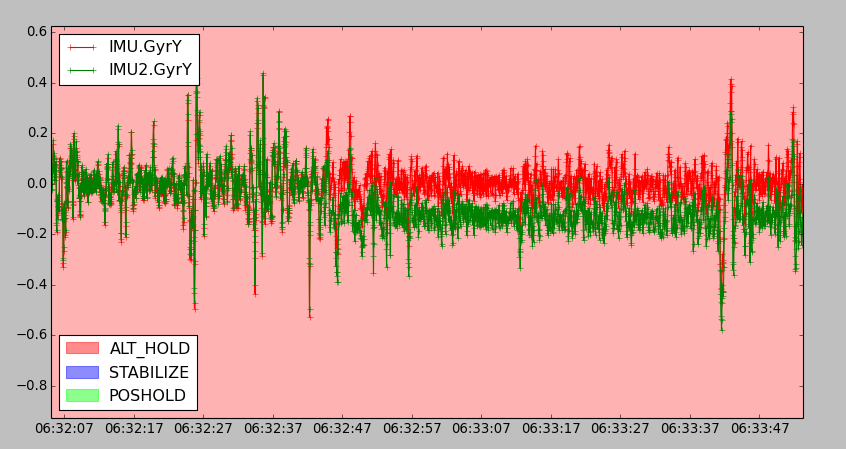
The primary EKF using IMU1 is happy with small compass innovations. The switching is in the back-up EKF which uses IMU2. It is not happy with very innovations and would be un-flyable if it was used.
The problem appears to be caused by an extremely large change in gyro bias that happens very rapidly in flight.
IMU2 is faulty and the board should to be replaced. If you are unable to do that then you need to prevent use of IMU 2 by setting INS_USE2 = 0 and EK2_IMU_MASK = 1
Thanks a lot! I don’t think I would have figured that out.
BUT… Recent flights have not had that issue… I guess I’ll keep an eye on my logs for a while to be sure things are OK.
Could it have simply not initialized properly and just been ‘bad’ for that power cycle?