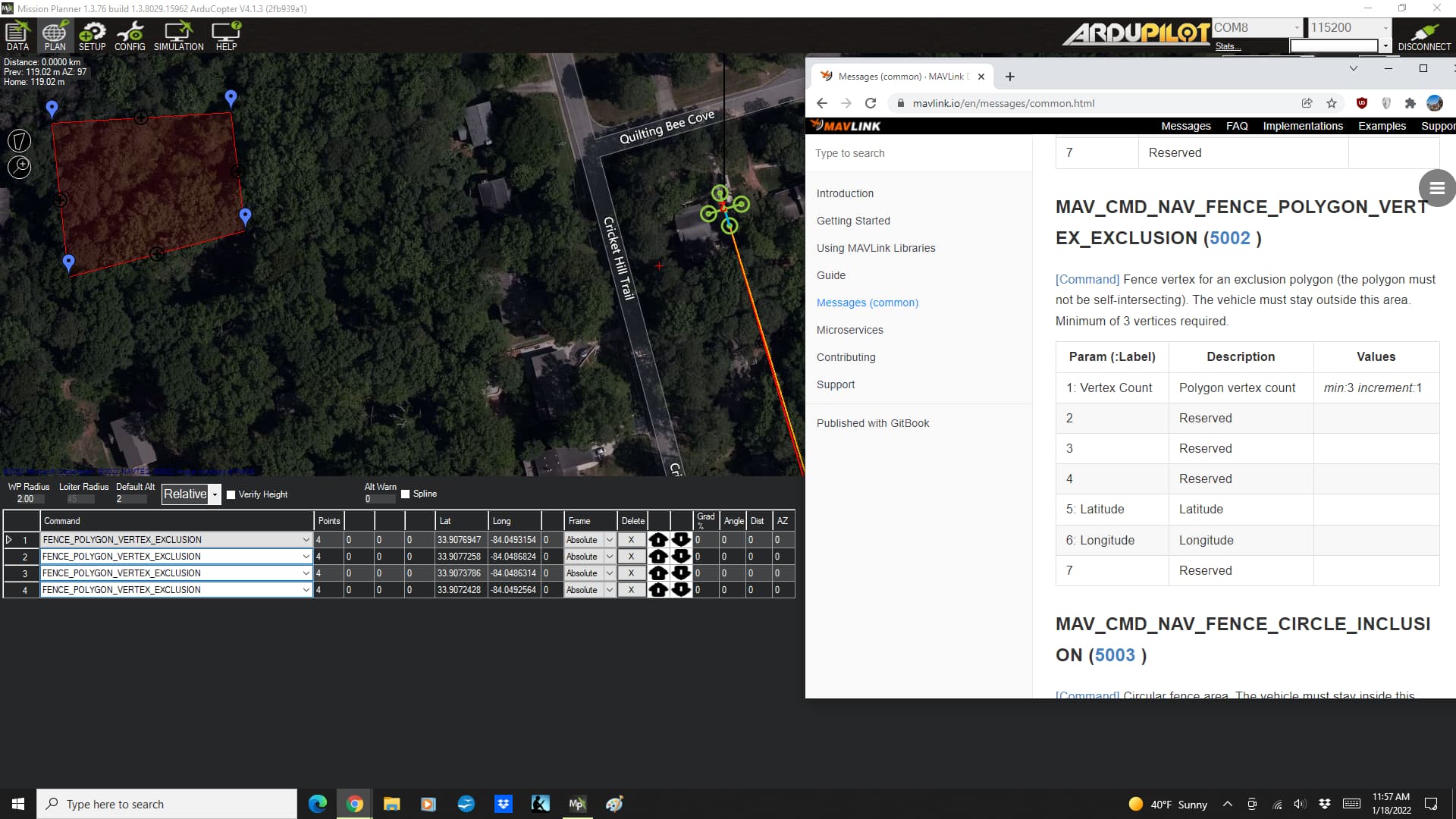
When creating a polygon fence there is a column called “frame”.
The default value is “absolute” - but the alternate values on the drop-down are “relative” and “terrain.” So this appears to be in reference to altitude.
I tried to looked up the mavlink command - but I’m not sure if I found the right one. But on the mavlink command that looked like it might be the one, this parameter position is listed as “reserved.”
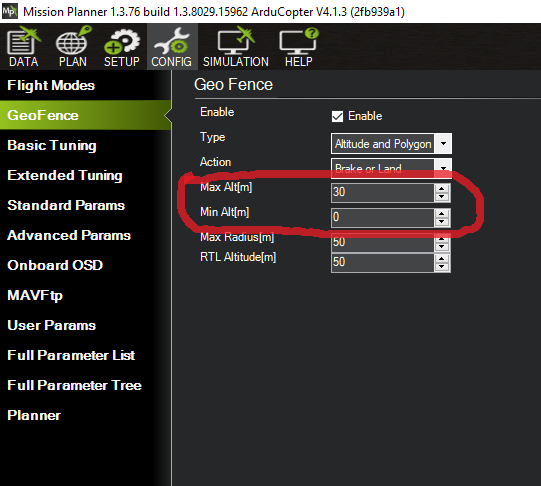
My best guess is that this value is used in concert to the altitudes on the CONFIG/GeoFence screen.
It would be great to know for sure. Can someone please shed some light on this?
And I’m surprised that the default isn’t “relative.”
FENCE_ALT_MAX, FENCE_ALT_MIN, and FENCE_RADIUS parameters are related with cylindrical fence centered at the home location. AFAIK, other fences (polygon, circular) do not have altitude. Of course, all the time, the vehicle must be inside the cylindrical fence I mentioned firstly (centered at home location), or autopilot says fence breach. So vehicle also obeys FENCE_ALT_MAX, FENCE_ALT_MIN at other fences, too.