this error is shown:
$ make px4-v2
…/mk/apm.mk:25: /cygdrive/c/ardupilot/src/modules/uavcan/libuavcan/include.mk: No such file or directory
make: *** No rule to make target ‘/cygdrive/c/ardupilot/src/modules/uavcan/libuavcan/include.mk’. Stop.
Can someone help me please where did I get it wrong?
Base buildsystem works great under cygwin. For automatic upload (waf xx --upload), we made small patch that is fixing cygwin uploads and it will be in master soon.
Yes Ubuntu is fine for development. Cygwin is rather similar to ubuntu/*nix. I think if we look main developers, majority are doing it in Linux. Is it native or in virtual box is another thing. Also quite many are doing development in mac. I personally use all those 3 platforms. After python and compiler packets are properly installed, waf works exactly same way on all platforms.
Windows development environments work (Both Windows Subsystem for Linux Ubuntu in Windows 10 and cygwin) but you do need to read and correctly execute at the setup steps posted on the website. The problem is that you did not even install cygwin…
I’ve some problems too. I’ve follow instructions and cygwin64 or eclipse build doesn’t worm on my win10. Firmware is 4.0.1 for arducopter. in cygwin64 there is Errno 22
$ ./waf configure --board CubeBlack
Setting top to : D:\Ardupilot\cygwin64\home\Luki\ardupilot
Setting out to : D:\Ardupilot\cygwin64\home\Luki\ardupilot\build
Autoconfiguration : enabled
Setting board to : CubeBlack
Using toolchain : arm-none-eabi
Checking for ‘g++’ (C++ compiler) : D:\Ardupilot\GNU Tools ARM Embedded\6 2017-q2-update\bin\arm-none-eabi-g++.exe
Checking for ‘gcc’ (C compiler) : D:\Ardupilot\GNU Tools ARM Embedded\6 2017-q2-update\bin\arm-none-eabi-gcc.exe
Checking for c flags ‘-MMD’ : yes
Checking for cxx flags ‘-MMD’ : yes
Checking for program ‘make’ : D:\Ardupilot\cygwin64\bin\make.exe
Checking for program ‘arm-none-eabi-objcopy’ : D:\Ardupilot\GNU Tools ARM Embedded\6 2017-q2-update\bin\arm-none-eabi-objcopy.exe
C:\Users\kowal\AppData\Local\Programs\Python\Python38-32\python.exe: can’t open file ‘‘D:\Ardupilot\cygwin64\home\Luki\ardupilot\libraries\AP_HAL_ChibiOS\hwdef\scripts\chibios_hwdef.py’’: [Errno 22] Invalid argument
Failed to process hwdef.dat ret=2
(complete log in D:\Ardupilot\cygwin64\home\Luki\ardupilot\build\config.log)
And in eclipse compiler just hangs after few proccesses with build command(eclipse is still working).
Do somebody knows how get it to work? I need to add some lines to bindings.desc file, for my script lua
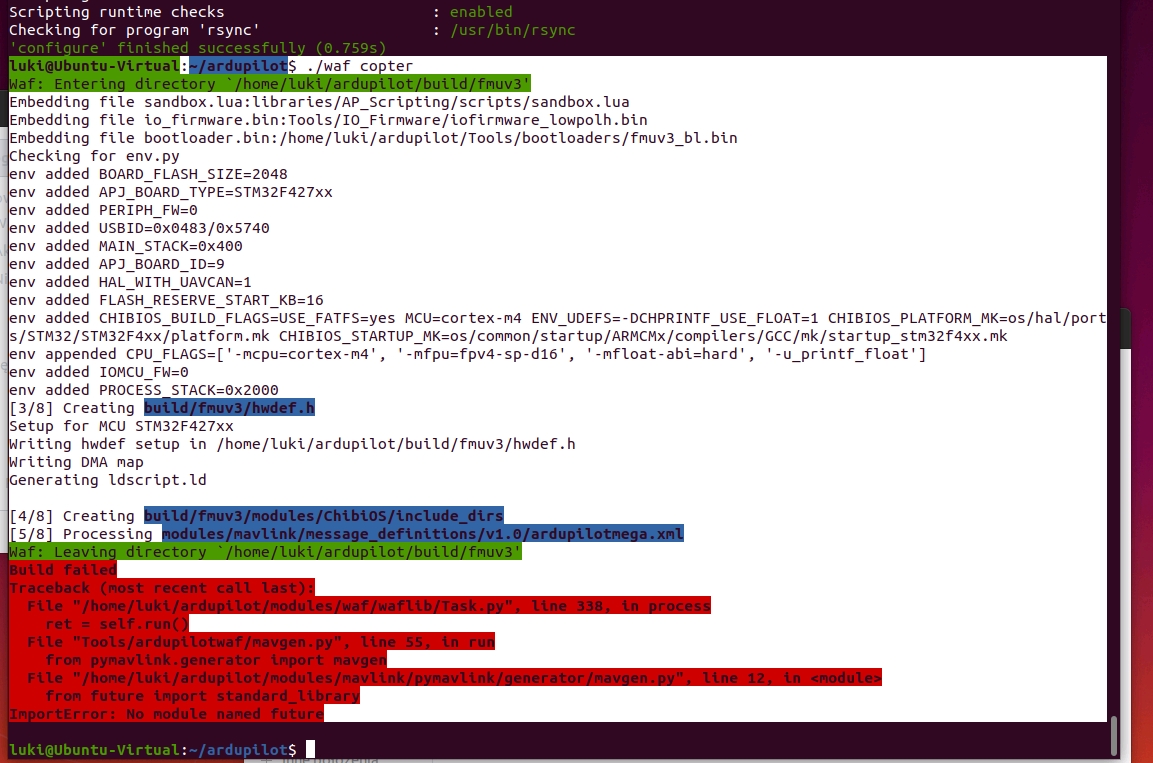
After 2 days of installing , configuring and so on of Hyper-V and Ubuntu on virtual machine, finaly i’ve compiler run and… there are errors too when compiling copter (configure was OK):
Sorry didn’t understad (linux i have used on colage 20years ago). Yes, i have ‘future’ (requirement already satisfied…).
But, but, i’ve experimented with mavproxy (with no luck on hyper-v), reinstalled gcc compiler, and now compilation is done… I don’t know what was the isue, but now it’s OK. (p.s. 5m28s on my Razen 7 3.7GHz not expected from me).