Hello everyone. I am pretty new using MissionPlanner and Ardupilot.
I tried to create a mission with “Terrain” WP, and enabling terrain follow in the parameters (TERRAIN_ENABLE to 1 and TERRAIN_FOLLOW to 1). I have of course rebooted my drone after these changes.
However, this is the result in the elevation graph :
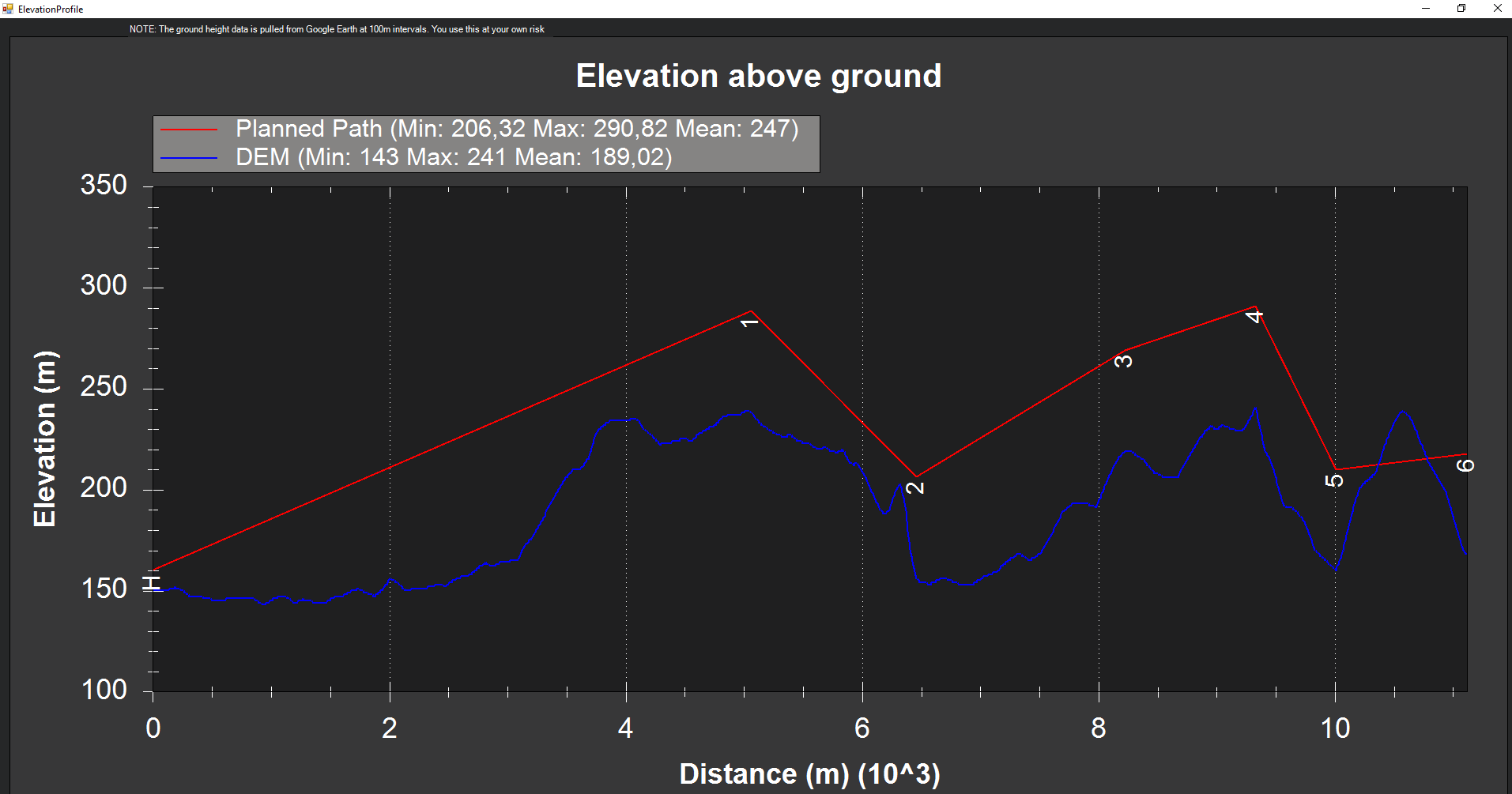
We can obviously see that there will have a collision with the hill. I chose “Terrain” for the frame, and the altitude is 50m above the ground. I tried with “Verify Height” ticked and unticked.
I am connected to my drone, with a good GPS signal and a valid home.
Does someone know why the terrain following is not working ?
P.S. : I am using latest MP and ArduPilot firmware