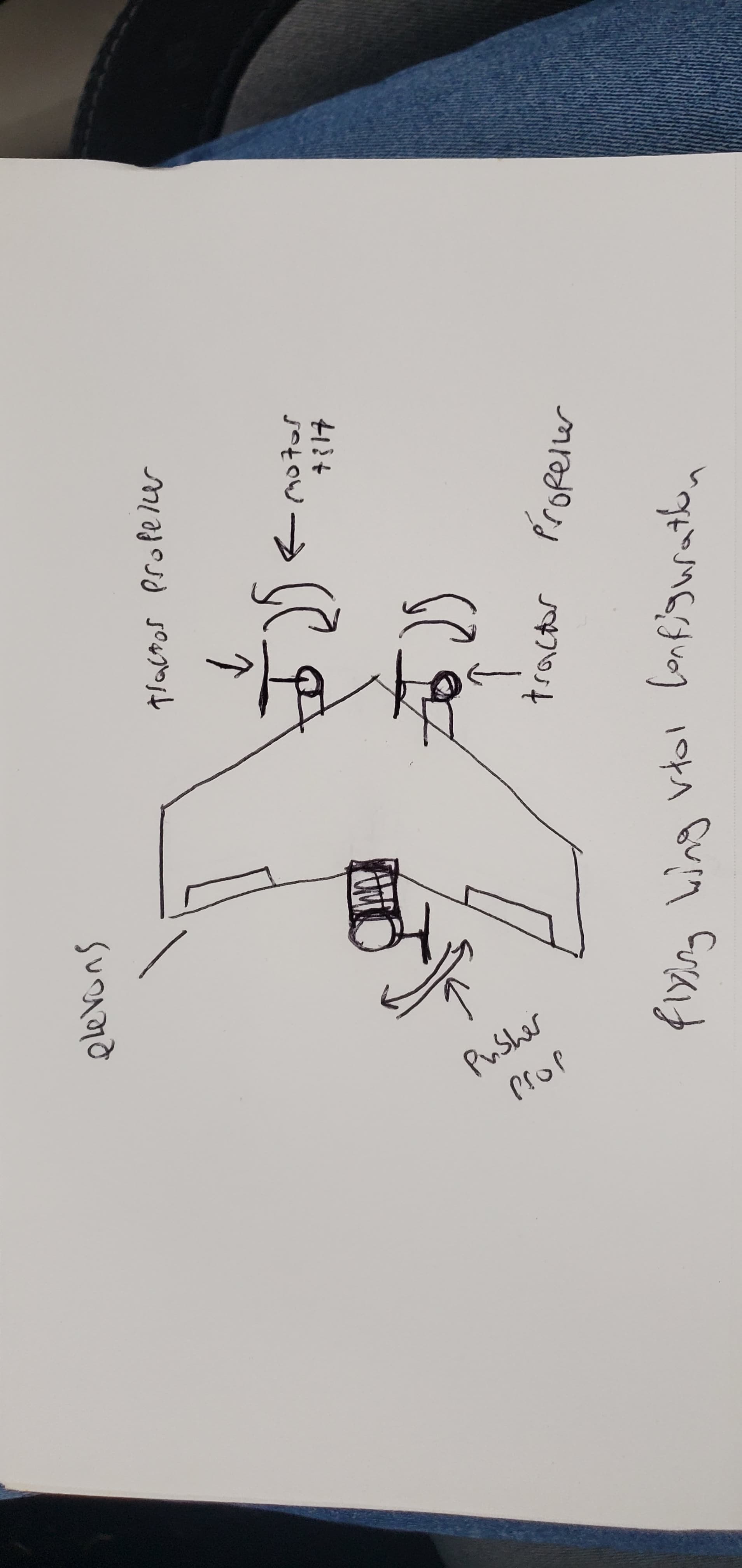
Hello, I am new to ardupilot and currently am using an f765 wing flight controller. I need to know how to set up a VTOL configuration as seen in the image below, and if it is even possible to have this configuration? I am asking this because i see tilt rotors with the front two tilting, but i want the back motor to tilt as well to contribute to the thrust, so is this possible(shown in the picture attatched)?
I think that would be considered as “tilt-tricopters with the front two motors tilting and vectored yaw” on Tilt Rotor Planes — Plane documentation (Read through that whole page carefully, there are a lot of things to deal with.)
I have not set one up, but I think it would be: Q_ENABLE = 1 Q_TILT_ENABLE = 1 Q_FRAME_CLASS = 7 Q_TILT_MASK = 7 (all three motors tilt) Q_TILT_TYPE = 2 (assuming you have separate control of the tilt of the two front motors and they can tilt further back than vertical)
Set SERVOn_FUNCTION to 75 for front left, 76 for front right, and 45 for rear. Set Q_TILT_YAW_ANGLE to how much further back the front motors can tilt from vertical.