I replaced propellers to get less vibrations and decided to re tune.
Wind was quite strong but nothing special.
After few minutes of autotune copter started flying away, got control for while but I was unable to return so I just hard landed on corn field, no major damage fortunately.
I looked into logs and really I don’t see anything there. No brownout, all props solid mounted and no sign of mechanical failure. Vibrations are ok I think, so any idea? Is pixhawk broken?
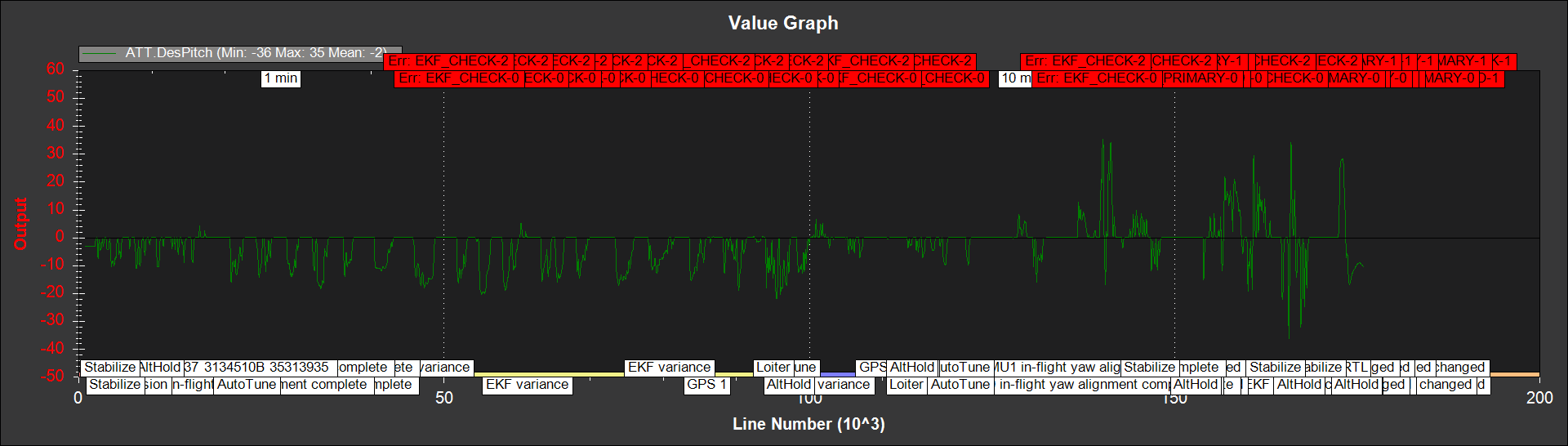
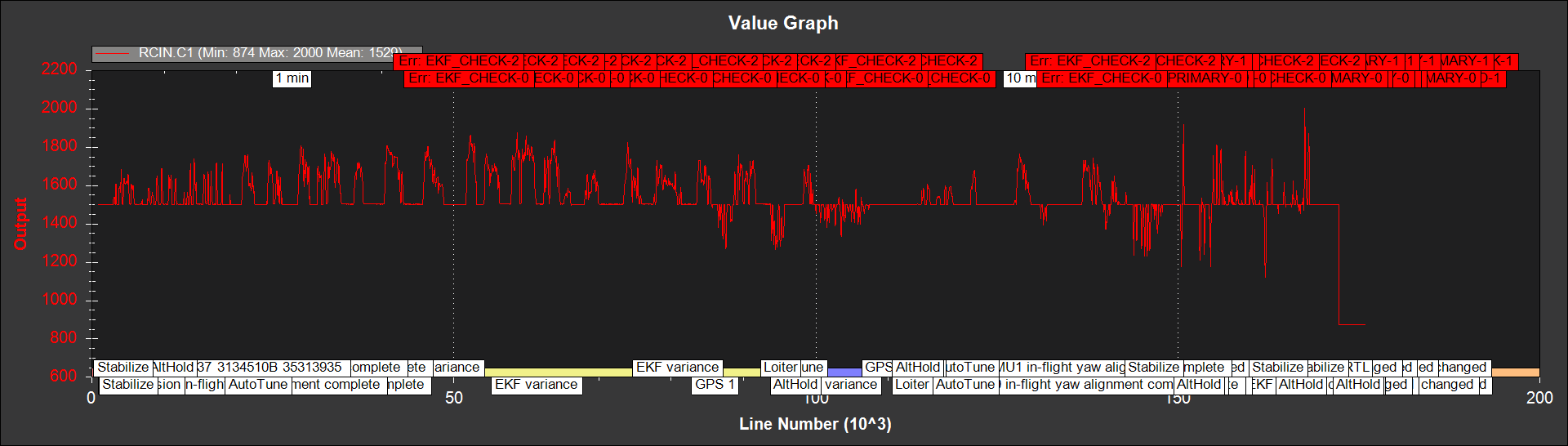
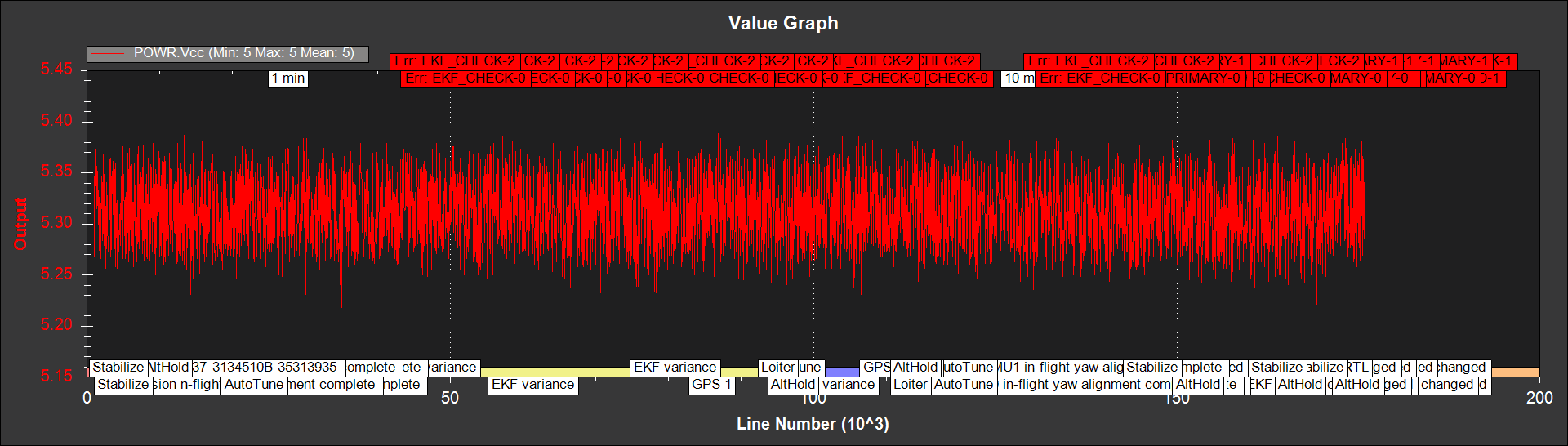
Your logs are full of a slew of EKF Variance errors
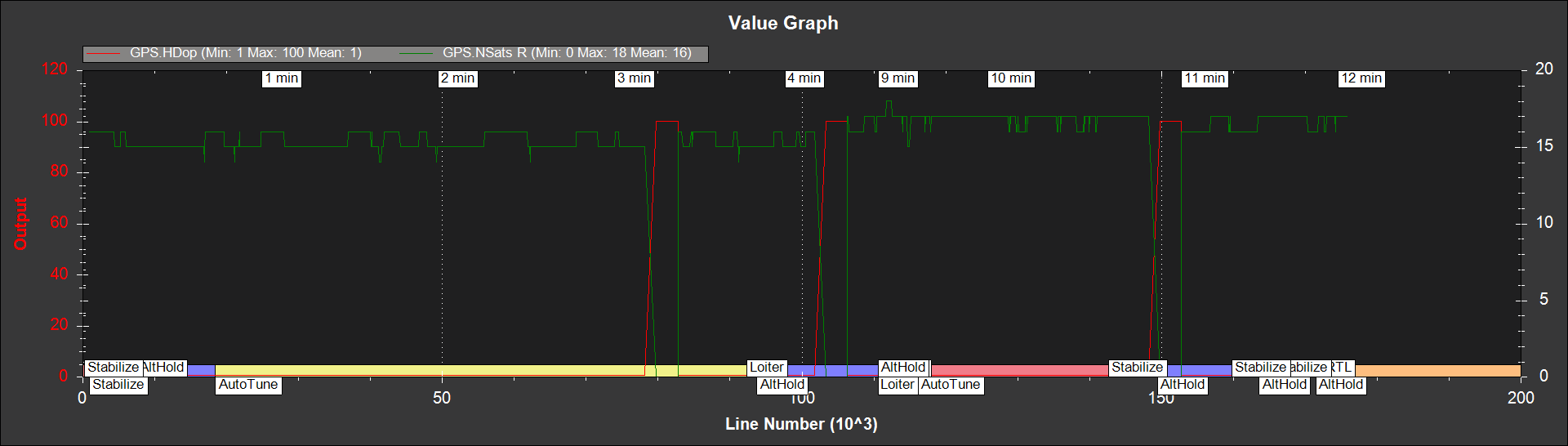
On 3 occasions the gps is reporting zero visible satellites. The at these points the HDOP rails at 99.9 - makes sense if the GPS lost it’s mind/SVs. As a matter of fact (after a cursory look) during these periods, I don’t see ANY messages from the GPS. I’d start looking there.
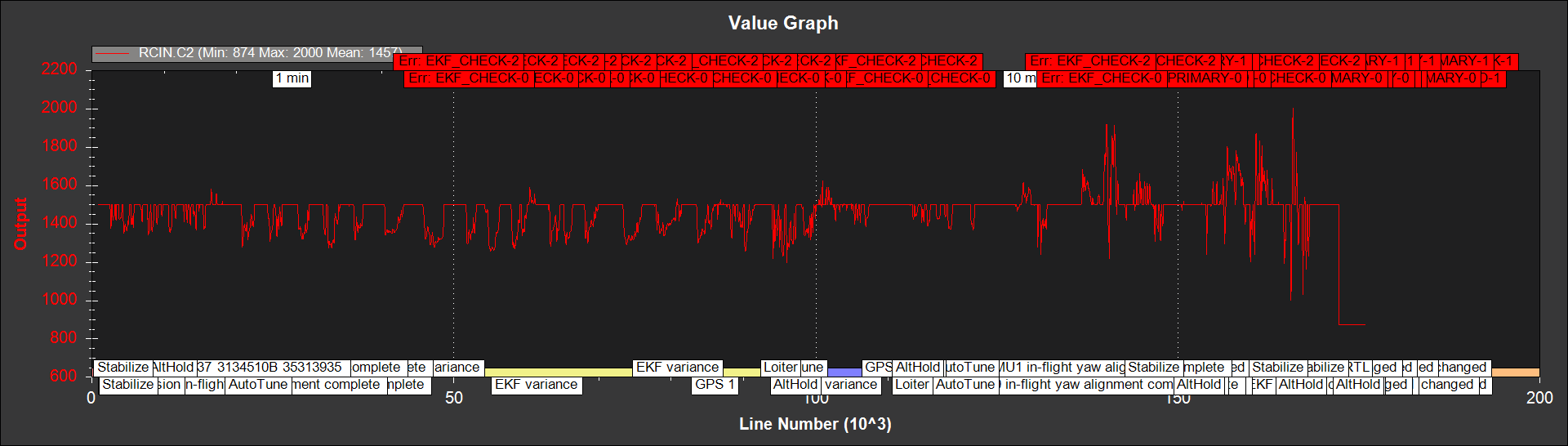
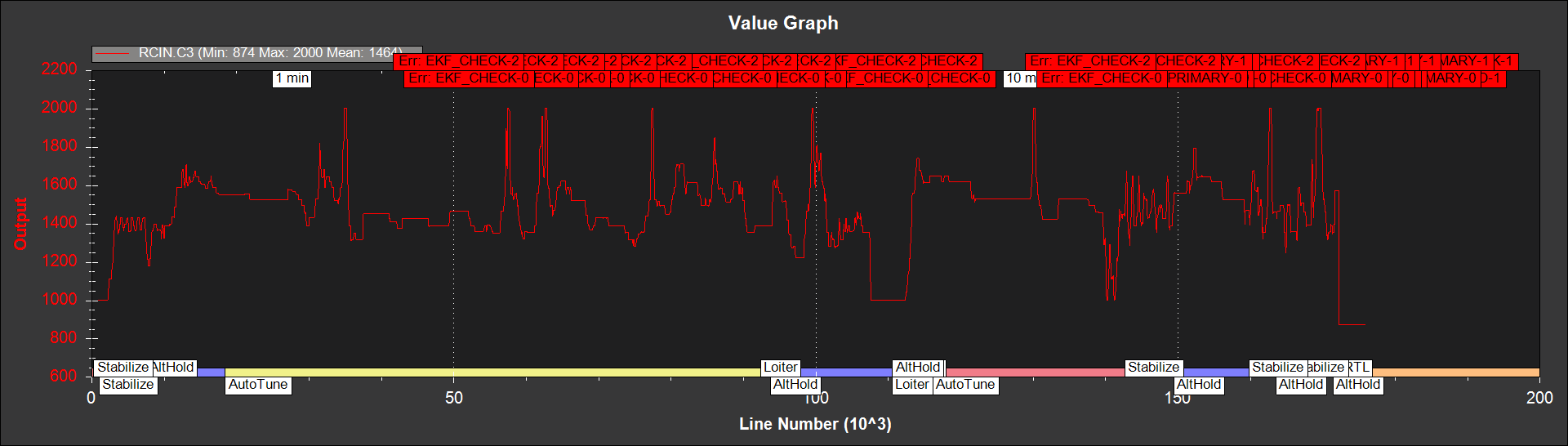
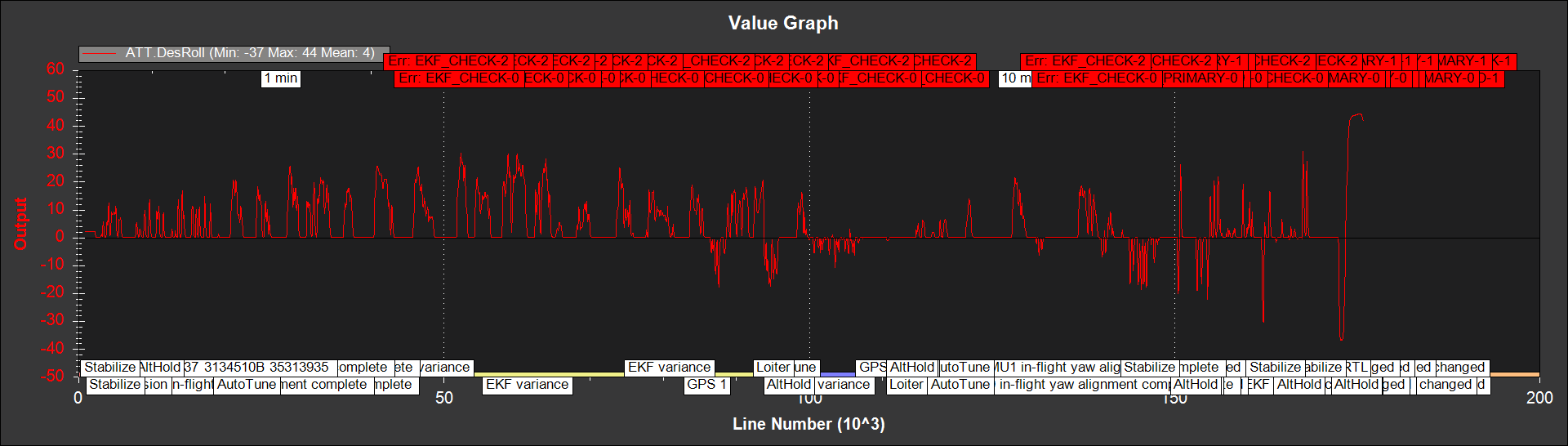
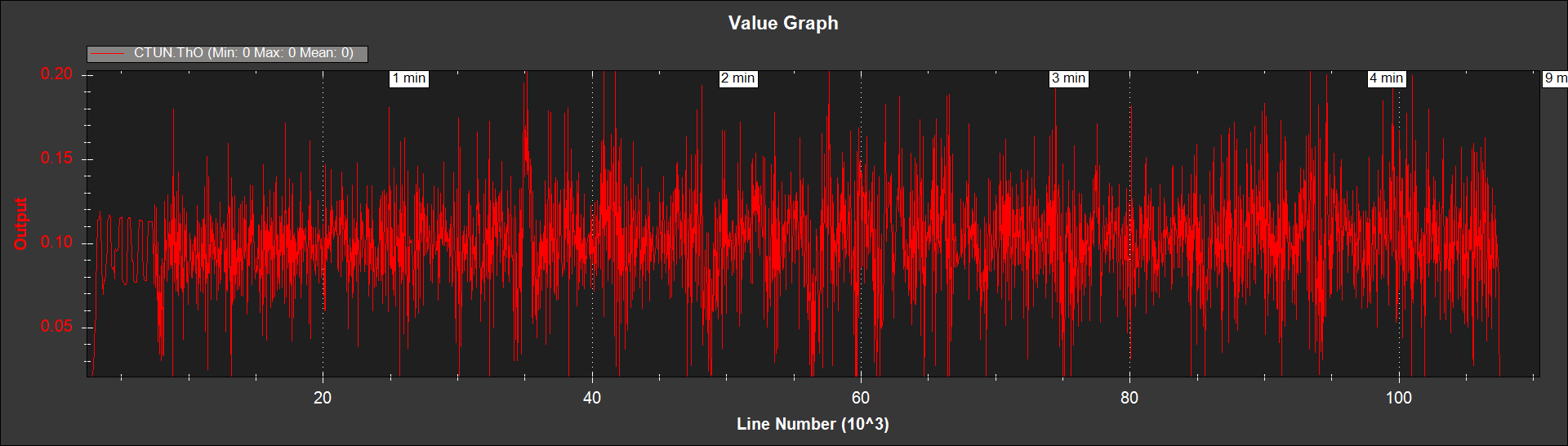
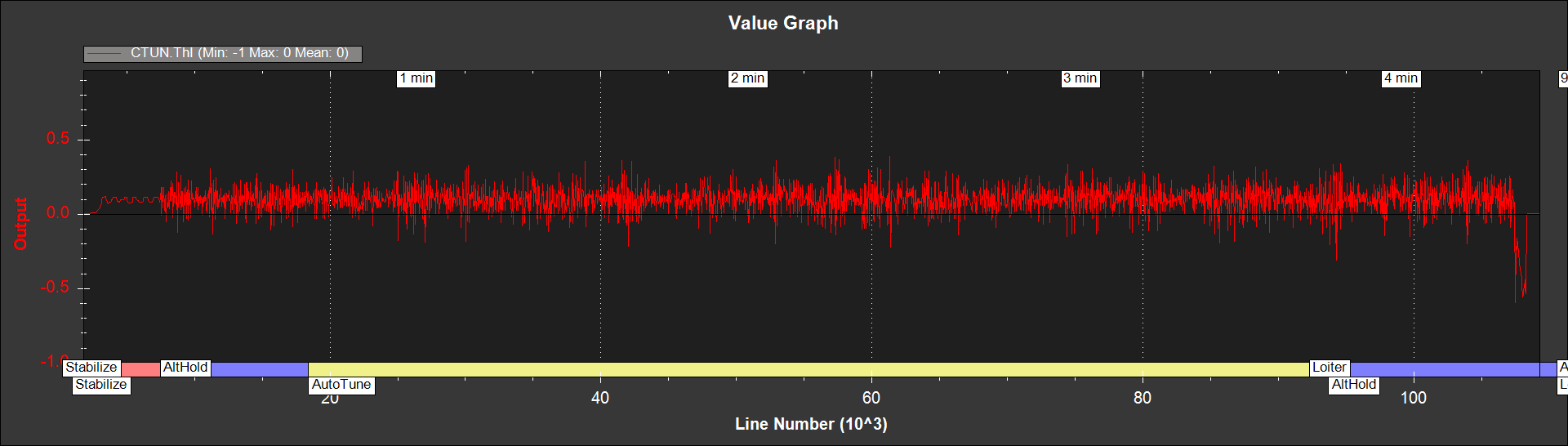
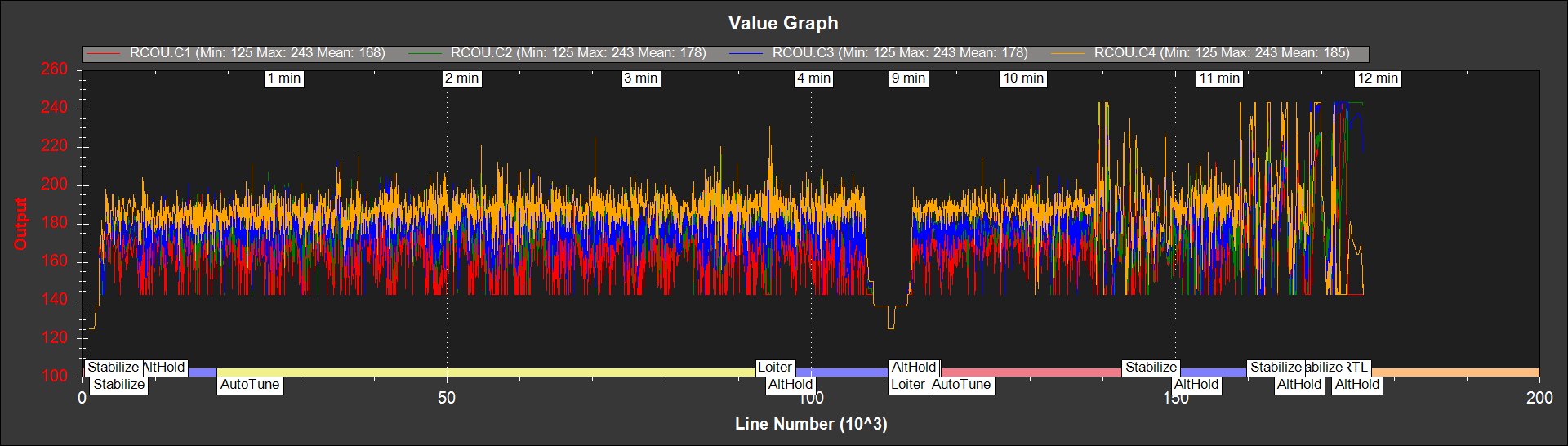
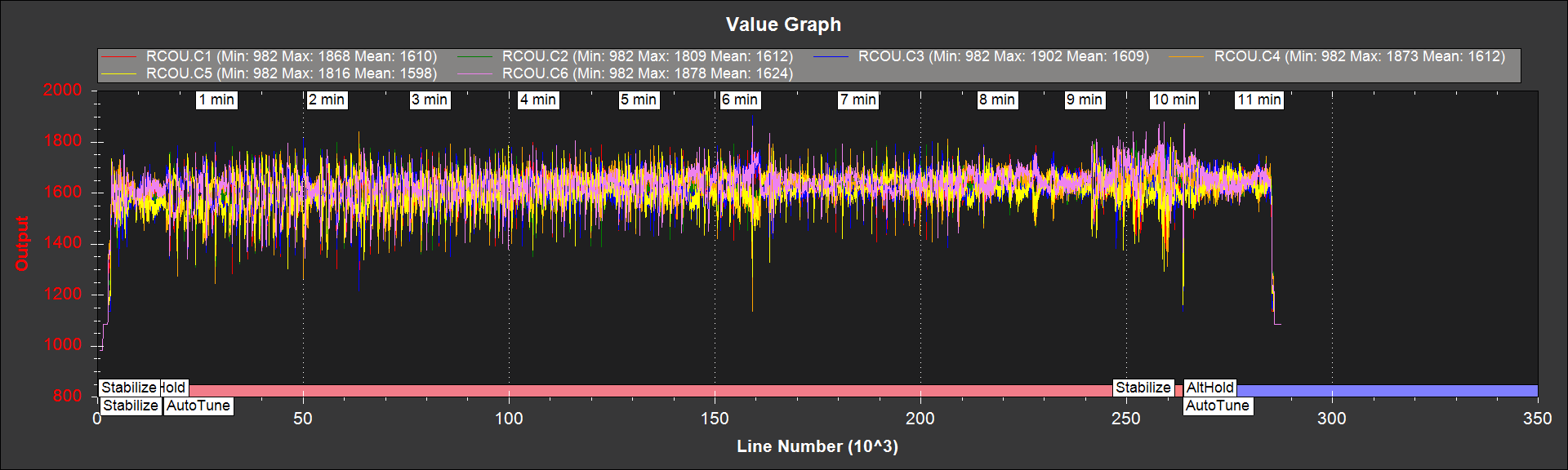
That log is a mess and a few things make no sense to me.The roll and pitch values,the motor output values,the throttle values just for instance.Maybe someone else can take a look and make something of it because it’s a mystery to me how it logged those values.These are the values I’m looking at.
There were three occasions the GPS disappeared altogether.You may not have been flying in a GPS dependant mode at the time but it shows a serious fault somewhere onboard.As do the huge amount of error codes and messages.The VCC is nosiy.
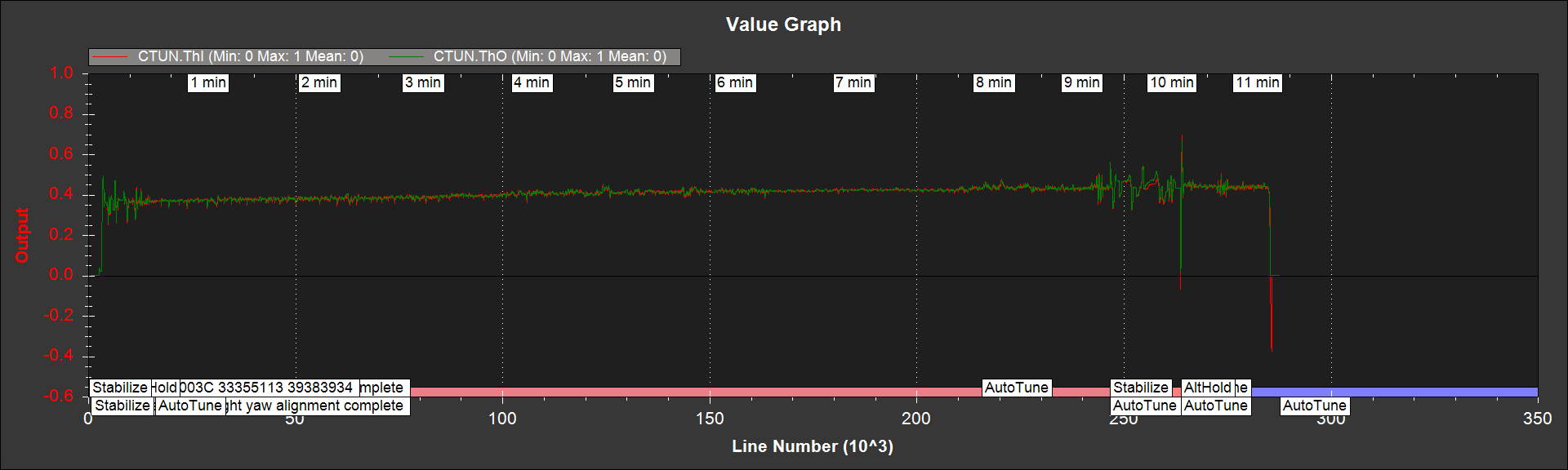
Autotune desires a steady mid throttle position to work but the throttle trace shows it being mashed about with abandon during the autotune mode but the radio in values for the throttle again make no sense nor do they coincide with the CTUN values.The ROLL appears to only roll left,the PITCH only appears to pitch backward and not forwards.Still nonsensical.
So although I can’t offer a specific explanation why it crashed there are plenty of reasons why it didn’t fly right.It’ll need an expert to dig a bit deeper in the parameters that are new to most of us to actually nail down the cause.
Throttle is easy to explain, it was windy so I was forced to move copter and sometimes use throttle.
Output values for motors are one shot 125 so this should answer ranges.
I noticed noisy power from power module but I don’t expect that this is source of problems and I have redundant power source connected to servo bus.
I will probably replace pixhawk to eliminate one potential sourse of problem but not sure when I will have time for full rebuild.
The point I’m making is that nothing makes any sense in that log.For instance - this is what I expect to see from a THR IN and OUT mapping of CTUN.They match,Your’s don’t.And I don’t understand that.
I think the noisy VCC is just a symptom but everything looks funky in that log to me.
But I’m not that deep into 3.5 yet and there are probably surprises waiting in store.Past experience would make me wipe and reload the firmware from the start.
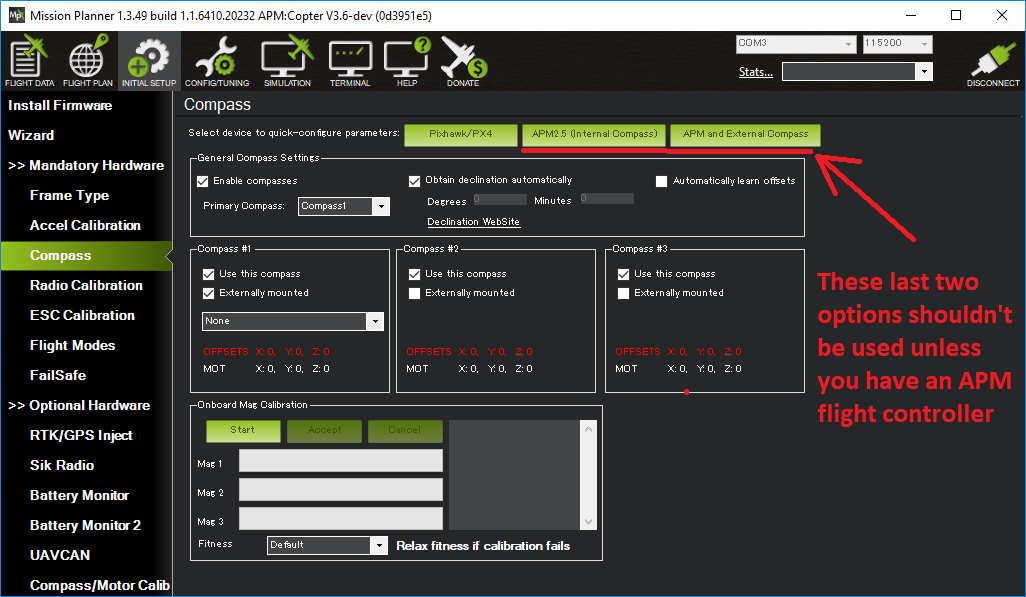
I think the major problem is likely the compass orientation. It’s set to “8” but should normally be “0”. I think this can happen if the user selects “APM” for the flight controller on the mission planner’s compass calibration screen. I’m sure this is what leads to the massive number of EKF resets. It’s a little surprising that you could arm, perhaps you bumped into the “inconsistent compass” message and then disabled the internal compass? Sometimes that’s necessary if there’s a lot of interference on the internal compass but in this case, that was actually catching the real problem.
By the way, MichaelOborne is going to remove those green quick-configure buttons if the MP knows that the user is not using the now-super-old APM flight controllers (that only run AC3.2.1).
Well internal compass is disabled (I will double check this today later) and I only use external compass so this shoudn’t be issue.
I didn’t expected to hold position during autotune, problem was that I lost control and copter started to escape.