Hello everyone. I have a hexacopter (mikrokopter frame) with a Holybro Pixwauk 4 flight controller in version 4.1.4 and I have never had any problems with it in over 4 years. I went to do a maximum flight time test with a 6S 13000 mhA battery pack with hover flight in loiter mode. When I made a slight forward turn the drone went to the left (90 degrees error) and quickly increased speed. All I was able to do was bring the drone to the ground to avoid it crashing into a nearby car.
Before doing this flight I calibrated the compass.
Here is a graph showing the sudden variation of magx, mgy and magz and also the calibration flight log and the accident flight log.
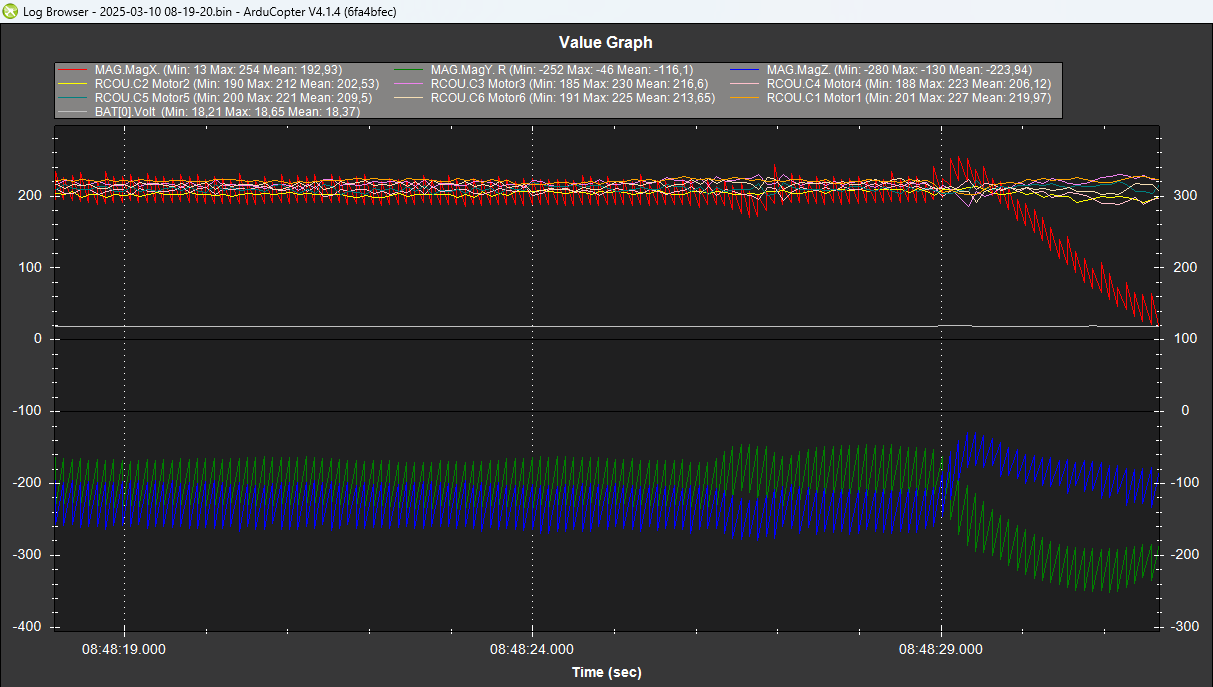
I think I have read all the posts about this type of problem, but could someone tell me what made the magx, magy and magz change so much the moment I gave the command for the drone to go forward?
Here is the compass calibration log: 2025-03-10 08-11-54.bin - Google Drive
Here is the flight log: 2025-03-10 08-19-20.bin - Google Drive
Thanks.