Hello,
I am pretty new to drones and I am working on getting my PX4Flow to work.
I am currently using the latest version avalible on github.
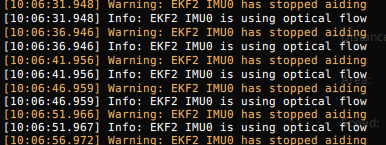
When I plug in my PX4Flow and start arducopter, I get the following two messages every 5 seconds:
As a rangefinder, I am currently using a self-written backend, so I can use the sonar mounted on the PX4Flow as a rangefinder.
Do you have any ideas how I can fix this problem?