Total newbie here but I feel like I’ve tried everything. Built a quad, pixhawk / Raspberry pi setup. Ensured all motors, prop orientation/spin, ESC order is correct. Everything is also properly calibrated. RC / manual flight controller.
Using Mission Planner. I’m convinced that it’s either a faulty ESC or motor. I could just go ahead and buy more another set of motors/props, but I hope to use this as a learning moment. Feels like if I knew how to simply read the logs, that I could see if one (or 2) motors are not outputting thrust correctly, instead of spending HOURS working on this thing… I don’t know how to read flight logs, but I’m wondering if there’s anybody out there that would be willing to review and see if that’s the case (or something else)?
Hi,
Simplest way to check if motors are in correct order os going Optional Hardware → Motor Test → Test all in sequence. “Motors are tested in a clockwise rotation starting at the front right”
Another thing to check, if you’re using PWM ESCs (ESC type “Normal”) is to ensure you calibrated the ESCs (Setup->Mandatory Hardware->ESC Calibration->Calibrate ESCs)
Nearly every case of this is a result of a misunderstanding in motor order.
Read this page very carefully, paying particular attention to the diagrams toward the bottom with the red lettering, and this note regarding your X8 configuration:
In the case of X8, it will spin the top front-right motor first, then the bottom front-right, and proceed around with the same pattern.
Hi Rolf, Rodrigo, and Yuri! Thanks so much for the help! I’ve tested the motor spins and insured that I have my ESCs/motors plugged into the FC in the correct orientation according to the Ardupilot directions.
I made a video of me doing a motor test and some other general things I’ve done/checked to fix the flipping on takeoff issue. Please tell me how I’m being just blatantly ignorant here… I’m grounded my dudes and I just want to fly!!
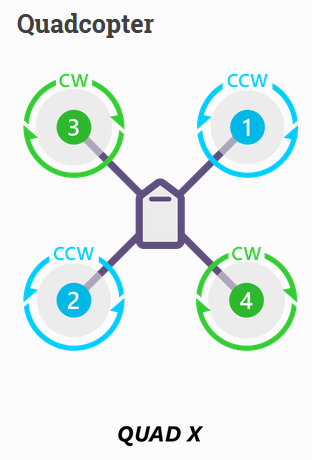
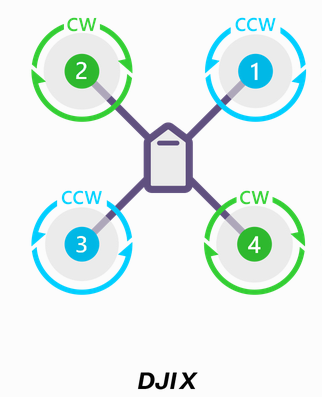
Seems I needed to order my motors based on the DJIX setup, not even sure what that means exactly. But all I needed to do was reorder my -X axis motors. Then they all test in sequence correctly (and actually flies)
My first flight didn’t end well given one of my plastic props snapped mid-flight (like broke, not because of a loose nut). Any recommendations on props that are worth a damn? I’m currently using a 10/45 setup.