Hi Shawn,
First of all I would like to say a big thank you for your spreadsheet. It was perfect for our initial flights. To have something like that to guide builders has no doubt saved thousands of $$.
Our combo is this,
Quadrotor
UA90 KV120 (Eaglepower) motors
40A ESC’s (Eaglepower)
30 x 9.5 carbon props
TOW 12- 18KG
Current flights TOW - 12-13kg
On board generator gives 2000W continuous
Background info is we bought this setup for development to see what did and didnt work. We have been flying it at the lighter end of the spectrum (1hr fuel max) to save the generator that has a tendancy to overheat with increased electrical load.
When you see MOT BOOOST, its because we are using that as a nice little workaround for generator control as apposed to the voltage sensing arduino which caused large variences in throttle.
You can see that our model is horrendously overpowered, using a hover throttle of .172 most of the time. This is using the Mot Thrst Expo of 0.8 as suggested in the spreadsheet. I stumbled upon Leonard hall’s explanation of that and it could be related?
In terms of the flipover which is the last file in post 4, DKEMXR commented that seeing motor 4 command a high PWM didnt nescesarily mean that the motor was powering up, more so that it wanted to power up and was likely not able to produce the thrust.
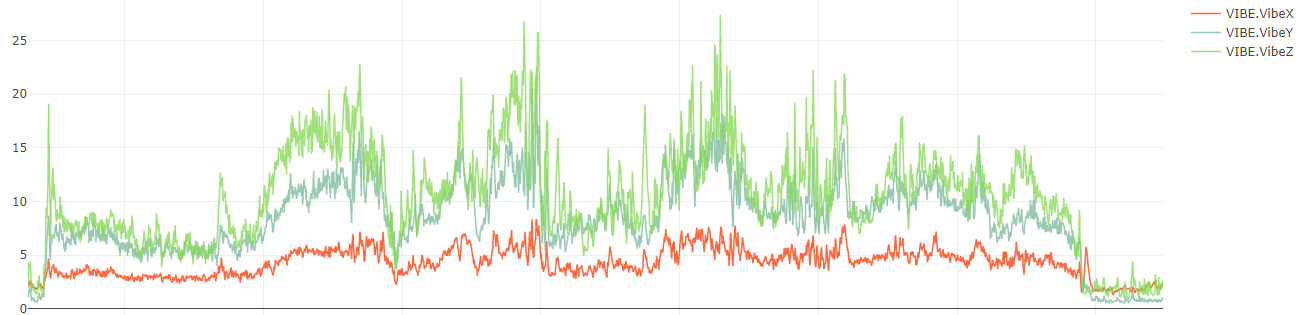
On this angle we replaced motor and esc on number 4 and had much more success. We also ground tested the generator and motors with props off with large throttle inputs. This resulted in our logs seeing desired and att yaw inputs whilst staying on the ground. Sometimes in the area of 15 degrees varience. As a result we raised our HERE 3 GPS which is used as our external compass and this reduced the spikes to about 7 degrees. So still work to be done there.
Note we cant do the motor compass calculation as we cant measure our current in such a high powered and dual dirrection generator type system. We assumed with this dual direction aperage from and to the batteries it would give unwanted results.
Now we have flown this adjusted motor and compass setup we have gotten fairly good auto flights out of it in light wind. However any sort of wind and gust is causing us to have variences and sloppy control. We raised our PI’s and was met with resonance or wobble so backed it off again.
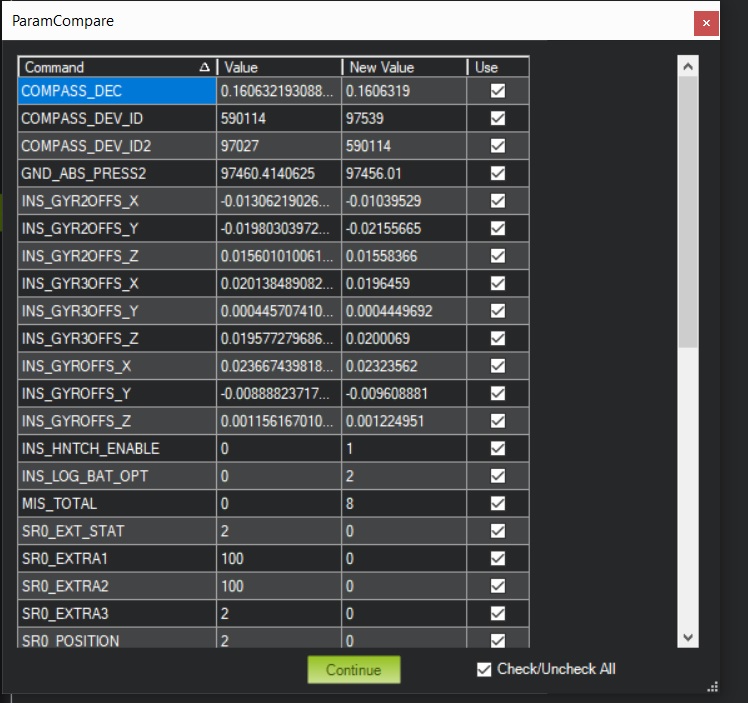
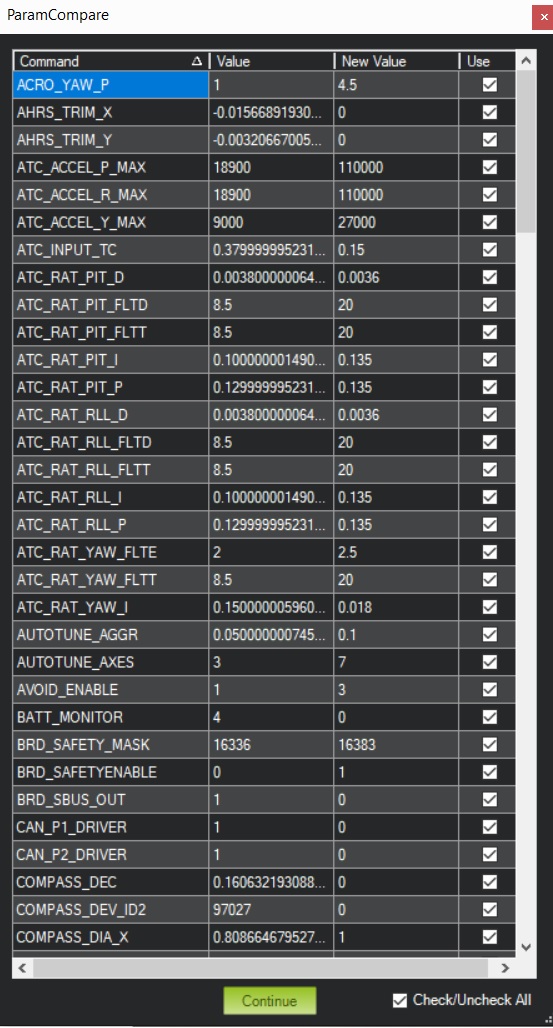
Currently we are sitting on
ATC ACCEL P MAX - 18900 (Per Spreadsheet)
ATC ACCEL R MAX - 18900 (per spreadsheet)
ATC ACCEL Y MAX - 9000 (Per spreadsheet)
Stab Roll and Pitch
P 0.13
I 0.13
D 0.038
Stab Yaw
P 0.18
I 0.15
D 0.0
These are two logs, the first log we fly an auto mission and we are attempting to make tight 20m line spacing. But on every corner halfway through the turn it starts banking more and ends up sliding backwards before the nose comes around. It is hardly coordinated.
The last flight and log we did you can see that in higher winds it cnt maintain nose direction.
On all of these flights we have our MOT SPIN MIN set to 0.15. And on the last flight you can see it slows down all the way to that base PWM trying to maintain heading. We could see the propellor just windmilling slowly at that min speed. And it obviously scared us as its not able to maintain that control.
My hunch is we are flying it too light and need to increase the weight to give more buffer between hover and low throttle to allow for torque to spin the craft. However our generator wont keep up. It would be great to have you or anyone first of all look at our tune and secondly chime in on options to help fix the torque steer.
For note, i did try autotune once and it flipped on its back at 50m. Irecovered which was lucky! The autotune never succeeded but was trying to put our P levels down at 0.078. I tried one flight with our levels down at 0.1 and whilst stabilse could control ok, in loiter any wind resulted in oscilations and overcorrecting lazily til we had to disconnect.
Jeff
First Flight lighter winds
https://airgeox-my.sharepoint.com/:u:/p/david_alam/EXJcjHekXdhHqqBRA95z4CQBfKVU6IfdyXX5JYCHwjtCjA?e=UdDjxl
Second flight Longer route
https://airgeox-my.sharepoint.com/:u:/p/david_alam/EW6nl-DcomRMuG_Hbo2kS-oBecQDkozlmDMYtHdC9t2N0Q?e=GvD6vG
Last flight couldnt hold yaw, updated roll and pitch
https://airgeox-my.sharepoint.com/:u:/p/david_alam/EYaLIxa-UCBDiG-IXRHzvIYBS1UtzgnED8wpju3PVla63Q?e=iJ0vHj
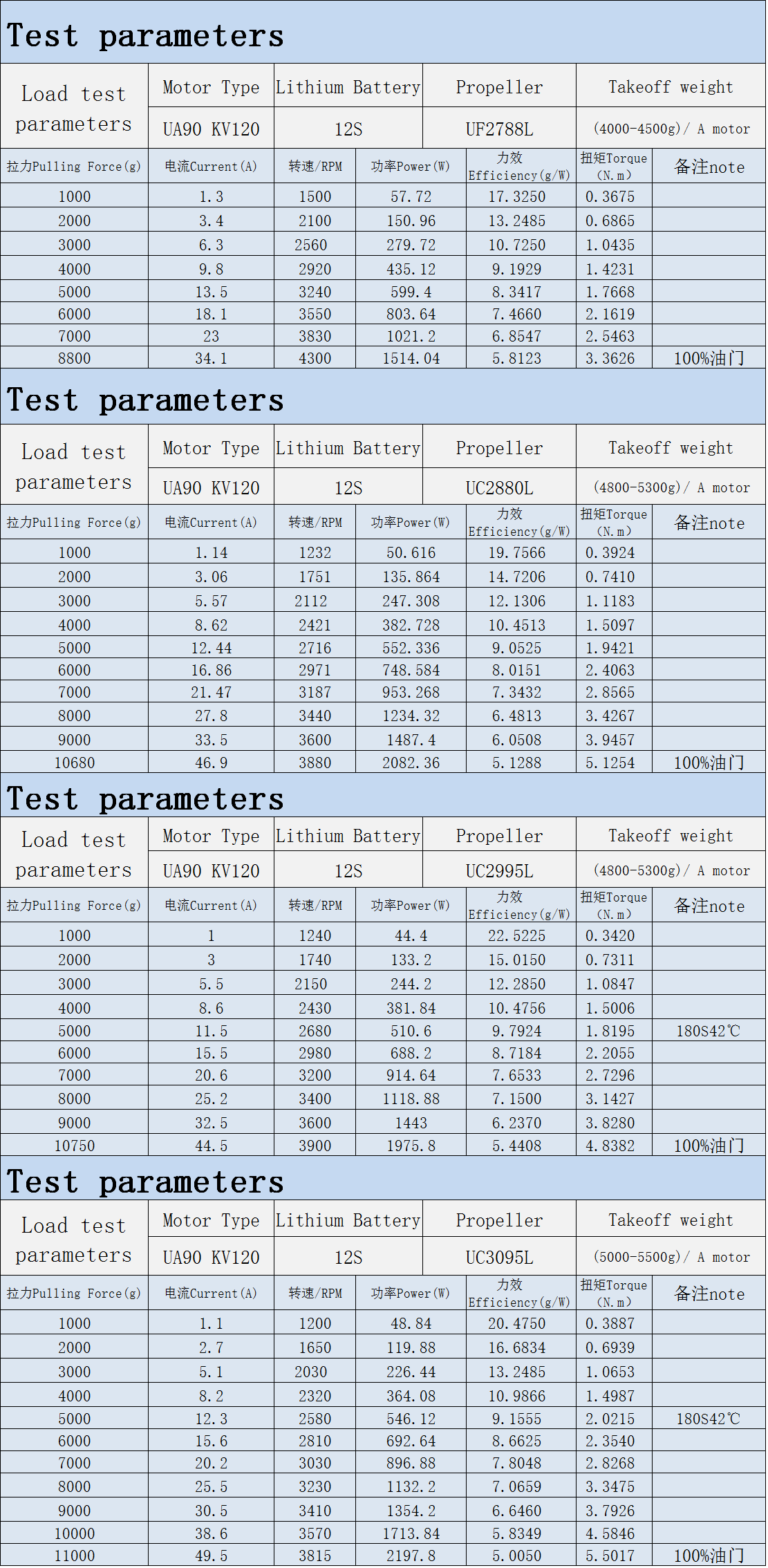
UA90 KV120 Specs with Differnt props, ours is 3095