This is my first blog post on Ardupilot.org. Until now I usually posted news about my project in other blog spaces, but as my project strongly depends on ArduPilot as flight controller, I feel this is the natural place to present my project too.
The post belongs to a series called “FlightZoomer 3 Innovation Previews”.
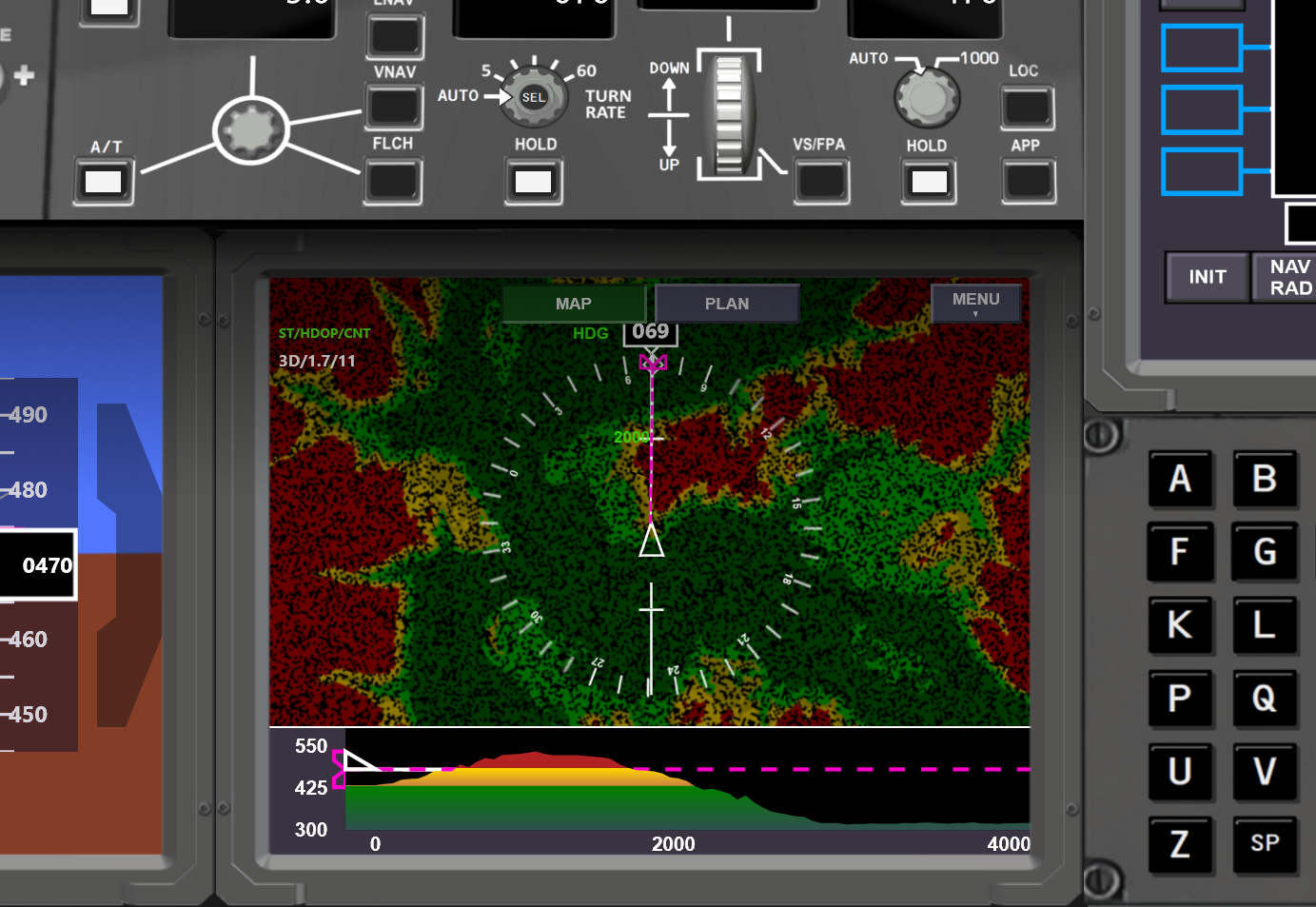
On the image above you can see one of the coolest features for the next release of my FlightZoomer apps:
There is a terrain elevation map and a vertical situation display. The look-and-feel strongly borrows from the VSD (vertical situation display) and the TERRAIN display of the Boeing 787 (after which FlightZoomer is modelled). The ergonomics, that are developed for professional pilots should be good enough for drone pilots as well!
To see how the changing colors provide excellent situational awareness about the proximity to terrain while flying, I strongly recommend to see this video here:
The following explanations provide some interesting background information about these features:
On this picture we see the VSD (Vertical Situation Display):

- There is a cut through the terrain along the current flight track (if there is forward speed) or heading (if there is no speed). If a flightplan is loaded the VSD shows a cut through the terrain along the planed route. All the waypoints are shown as well as the entire vertical flight profile of the planned route.
- On the left the white triangle is the airplane symbol at the current altitude
- The magenta line is the armed target altitude of the autopilot. It moves while adjusting the target altitude on the MCP which helps to set a safe target altitudes on the fly
- The white line shows the current flight path angle
- The terrain is shown in various colors
- Green are altitudes more than 50m below the aircraft altitude. Green terrain is considered as safe
- Yellow are altitudes less than 50m below the aircraft.
- Red are altitudes higher than the current aircraft altitude
On this picture we see the Navigation Display with the terrain layer switched on:
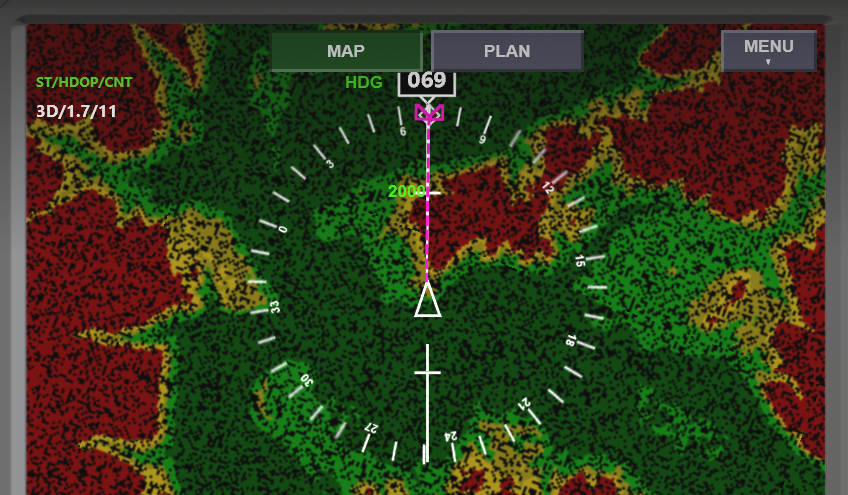
Again the colors have the same meaning as above.
How should yellow terrain be interpreted?
It is perfectly normal and acceptable (actually unavoidable), that the terrain will turn yellow on a final approach. On the other hand yellow terrain poses an increased risk of a CFIT because of obstacles or inaccuracies of the system.
Some more details about the implementation:
- VSD and terrain map are updated with 1Hz
- The elevation data of the terrain is downloaded from the internet on demand.
- There is worldwide coverage at any required resolution (= zoom level).
- There is a two stage caching of the elevation data in order to reduce internet bandwidth consumption and to achieve a high performance. 1st stage: persisting on the device, 2nd stage: in the heap for fastest possible access
And - for those who think “I have no idea what FlightZoomer is all about” - here are some high-level buzzwords about FlightZoomer:
- FlightZoomer is distributed avionics suite on top of ArduPilot. It has a companion computer (a smartphone) that is connected via a cell-network-data-bus to a ground station that offers comprehensive instruments, a flight management system and an autopilot. These features allow basically to fly IFR.
