In my first post in February I presented the Terrain Map and Vertical Situation Display of the upcoming Release 3 of FlightZoomer. This time, I’d like to present two other new innovations of FlightZoomer Version 3 in one post…
First the synthetic outside view:
The highlight in the video above is the synthetic camera, that offers an FPV experience without many of the disadvantages of a classic FPV approach. In the video 10 advantages of the synthetic camera are listed and demonstrated:
- No video data transmission needed -> less hardware, less complexity
- Truly worldwide range if there is nothing more than 2.5G cellular connectivity
- Highly improved reliability
- Cut the Gordian knot of zero cost Full HD FPV
- Principally no yello, no shaking
- No fog, no clouds, no twilight, never night
- Adjust the viewing angle during the flight
- Adjust the camera tilt and yaw angle during the flight
- Manual snap back view direction control (MSBVDC :-))
- Integrated optional zero lag gimbal
Of course there are limitations too:
- Close to the ground the synthetic view lacks accuracy.
- 3D cities are limited, 100% world wide coverage is only offered as aerial image laid upon an 3D elevation model (which offers still remarkably stunning views, especially when cruising a bit higher)
- The scenery stays static. You cant observe non-static objects, like traffic, cars,…
The solution is implemented using the MapControl of the UWP programming stack. It offers a comprehensive API to place a camera over the 3D landscape at any place and specify all the parameter, that we need (including pitch and bank angle). B.t.w. this is also the reason, why this solution is not easily portable from Windows to Android or IOS (in fact not doable at all): the Android or IOS map API do simply not offer the needed capabilities for this feature. Google does not support to place a camera at all at a particular position and altitude and Apple does not support the combination of setting pitch & bank while using 3D maps with an aerial image.
An important detail is the possibility, to additionally feed the video from a real FPV camera into the app. The real camera view can be placed on top of everything else as a small, moveable and resizable overlay. This feature perfectly complements the overall package, FlightZoomer offers.
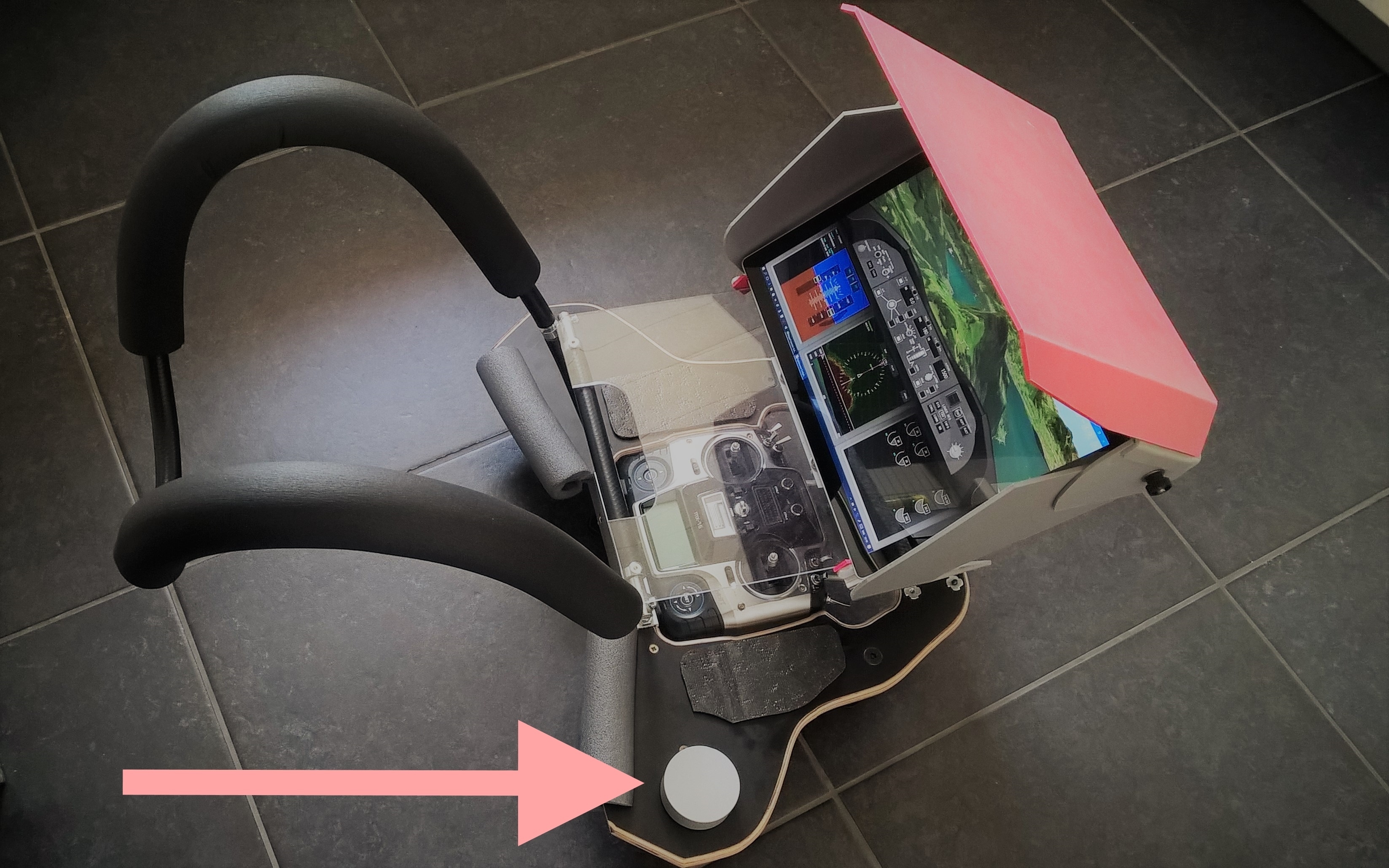
Second, control the autopilot with a single, radial controller:
When Microsoft announced the Surface Dial last October, I immediately knew, that no better application could be developed for this controller than controlling the flight path of drones. The dial literally cries to be integrated in FlightZoomer. It is a perfect fit as an efficient, yet simplistic man-machine interface, to control the FlightZoomer autopilot.
For weeks I checked availability in Europe, only to order an overpriced device from the US Ebay finally. As it arrived I probably got one of the first Surface Dials in Europe…
But it was worth the effort: Changing modes by pressing it and selecting target values by turning it - how more simple could flying be? One man - one hand - one controller!
In the video above, you can see how the controller perfectly supports relaxed flying as well as street canyon hunting…
