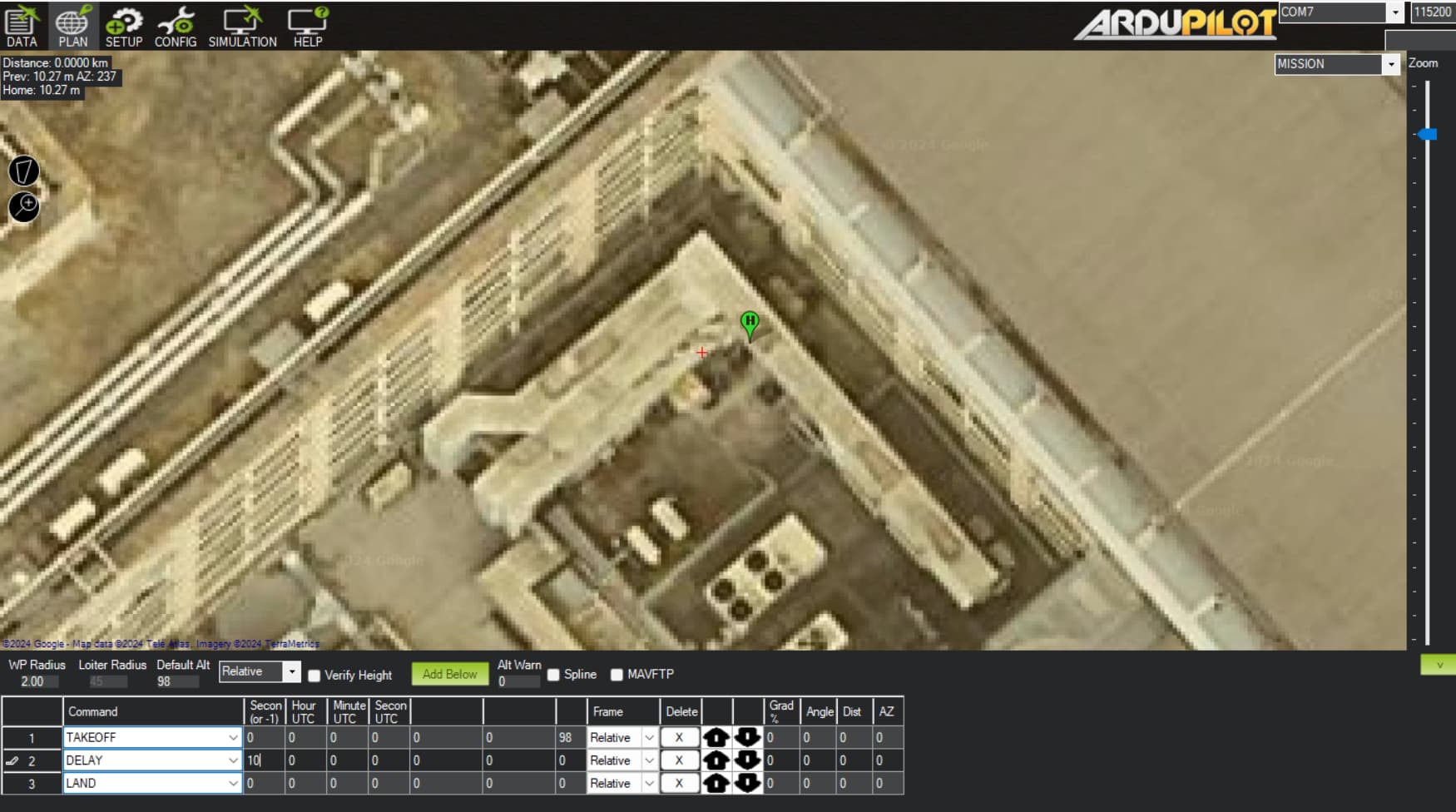
For a flight plan I am tying to simply get the drone to hover indoors for say 1.5m for 10 seconds and them just land. Currently, the picture below is the way I think is correct which I need to confirm.
Are my commands list below correct and for the place where I wrote the 10 seconds delay? I have not put any waypoints on the map, am I meant to for takeoff and land? Also, the altitude is the default altitude, for it to go and hover at 1.5m, would that mean 98m would change to 99.5m? Please note I do have a lua script where the altitude is set to 91.7m as I got this from Google when I also checked my coordinates to get precise ones. I am not sure if the default 98m in mission planner is correct.
A clue here because it could have been disastrous indoors. The answer is it would have tried for 98m in elevation on take-off because it’s set for “relative” which is default. After planning the mission right click then Map Tool>Elevation Graph. Make sure you understand what it’s telling you and if it’s your intention before flying.
I realize you will eventually be flying this indoors but it’s a very bad idea to be doing so now until you know what will happen. Take it outside for testing.
BTW-I have had a multirotor hit the ceiling in a building because I did not consider all eventualities. In that case it was an RTL to RTL_ALT as I recall.
Thanks Dave. I am a bit weary as well which is why I wanted to make sure I know how to suitably set a flight plan which I know for sure what will happen before I try to set one. If there are parameters for altitude or any flight related ones I will be sure to check them before I do anything.