Hi there,
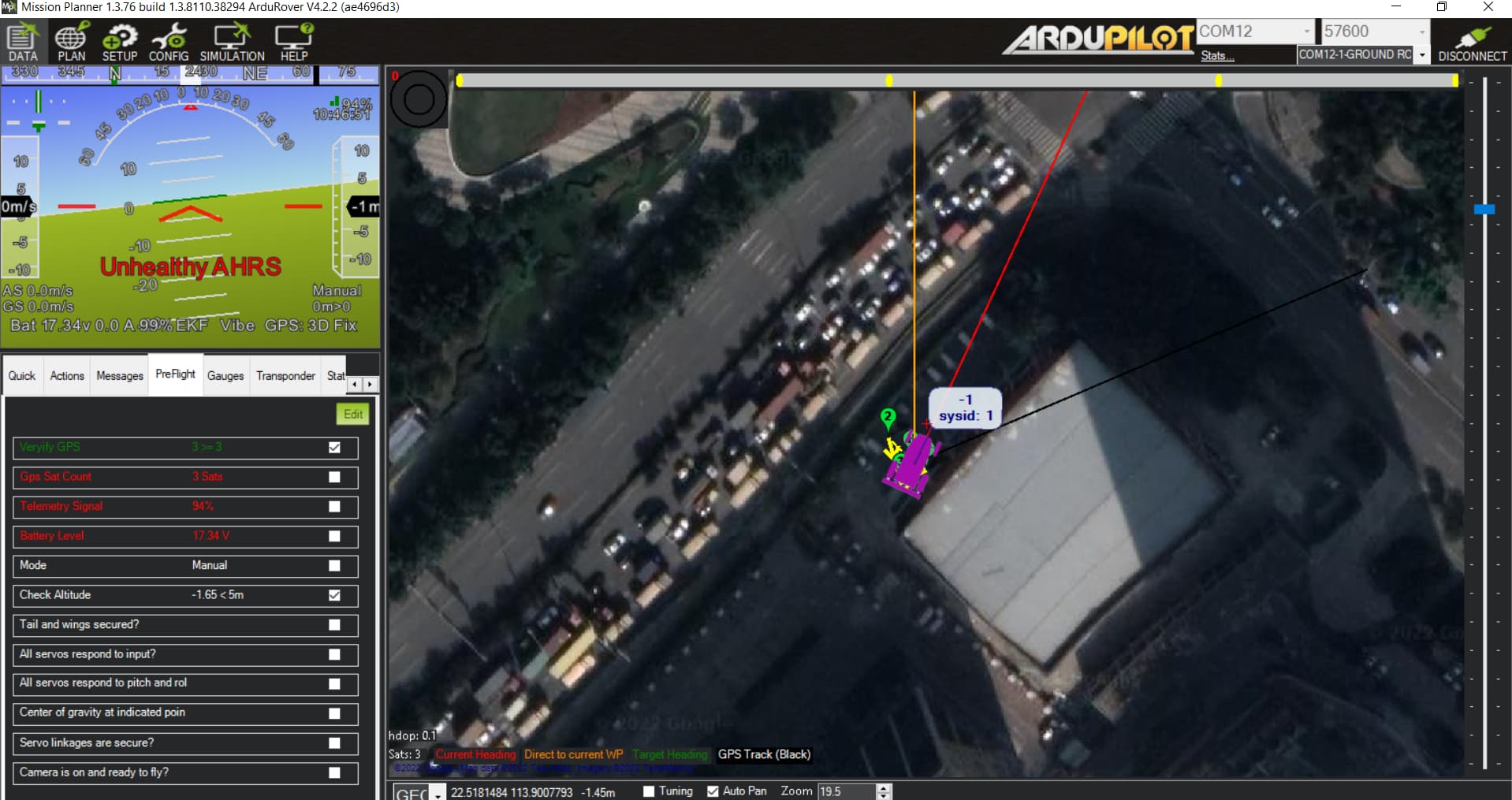
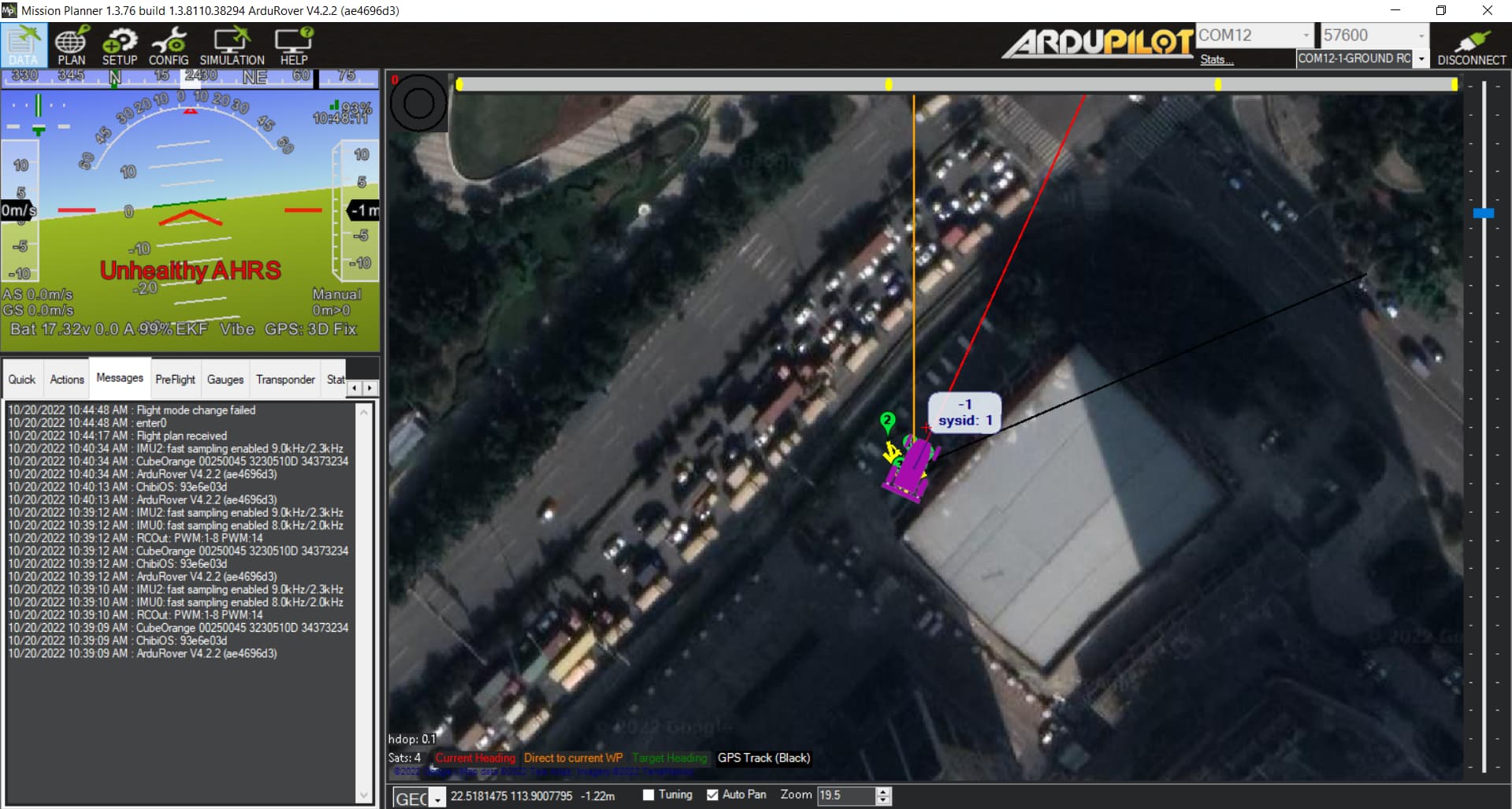
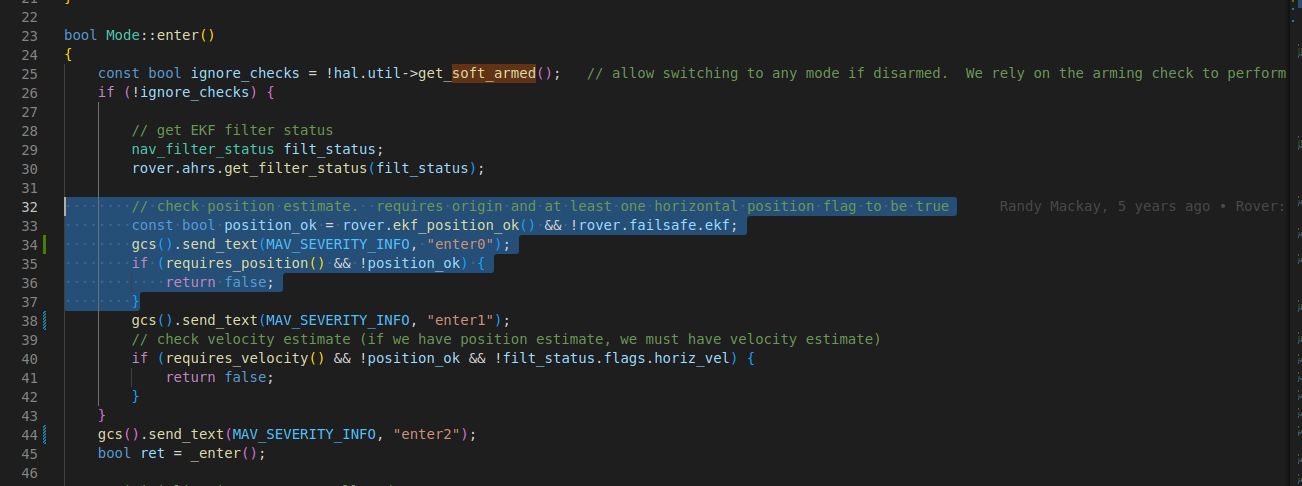
I’m testing the rover with fake-GPS of UWB. When I use RTK GPS, the rover can work with auto mode. However, when I use fake GPS of UWB, it always shows Flight mode change failed and can’t change to auto mode. I debug the code and found it failed when it run mode::enter() at position_ok. Can you tell me what I need to setup?