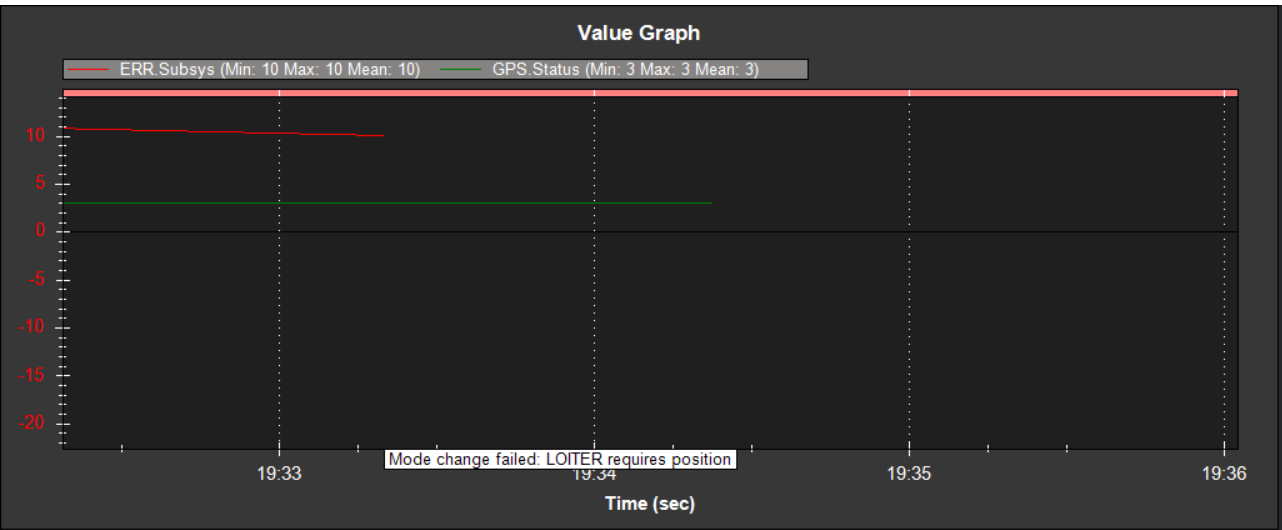
I am building an autonomous boat using Ardurover. Whenever I attempt to switch to Auto mode I get this message and the flight mode fails to change. What could be wrong? I created a mission and uploaded it to my boat. The flight controller arms and doesn’t report any problems.
Nigel,
It’s most likely that it doesn’t have a good GPS lock, or more accurately, the EKF doesn’t have a good position estimate. It’s also possible for the EKF to become unhappy if it has a bad compass heading.
The other somewhat unlikely possibility is a badly formatted mission. It was uploading using the Mission Planner?
If you have a dataflash log we can take a look but it’s almost guaranteed to be a bad GPS position.
Hi Nigel,
Did you solve the problem?
Why don’t you follow these process:
- mode GUIDED,
- arm throttle,
- mode AUTO
Sincerely,
Dongsin
Did you end up finding a solution if so please share as I’m having this exact issue
I’m getting the same error “Flight Note Change Failed”. I have rtk Fixed so I wouldn’t know what to diagnose or debug… @tridge would you offer a suggestion?? log7.bin (355.9 KB)
Have not learnt how to read logs yet but have you made a mission task as it needs to be ready and click write wp.
Can you see the flight modes change when flipping the 3 stage switch on your RC.have you made all the calibrations.
Nevermind. I had AHRS_EKF_TYPE wrong (had set it to 3 when experimenting earlier today; set it back to 2 and all is fine).
I encountered the same problem, please solve the problem of the owner, can you tell me how to solve it?
Hello and thank you for sharing your experience
I did it but no luck
do you have any other solution to recommend us?
No success my friend
do you have any other idea
?
mybe you can keep away from metal,and just calibration ,
Hi everyone,
Can some experts help us please?
manual works perfect. Gps locked and EFK normal.
When Disarmed : switch flight mode from Manual to Auto or Manual to RTL works
When armed : switch flight mode from Manual to Auto or Manual to RTL doesn’t work : I have a message flight mode change failed.
Also: when disarmed with the flight mode is Auto or RTL, then armed. Auto or RTL is working.
Can anyone please help?
Thanks a lot for your support.
Yohan
I found the issue: I have calibrated the compass from the GPS and the Pixhawk separately so it creates variance problem. Also, I tested the gps on my terrasse but it seems that the gps is very weak when the boat is closed to a building.
Solution: calibrate all compass at the same time + use only 1 compass to avoid variance error + use the boat far from buildings