New EDU-450 (Hexsoon frame) Build here. Looking for advice about battery tuning and flight times.
After a couple maiden hovers and gentle tuning, I loaded on a gopro and old cheap gimbal.
THAT flight ended in a RTL on a battery failsafe after a whopping 3.5 minutes. Some general info about what I have here;
EDU450 frame (v2 with 920KV 2216 motors, 20A ESC with 30A Max, 10/4.5 props)
Herelink v1.1
Using the Hexsoon PDB that came with the frame.
Cube Orange+ w/Standard ADS-B board
Here3 GPS
3 x TF-Luna Lidar units
24 grams of 3D printed parts
gopro Hero 3 silver
cheap gimbal (200g)
My battery right now is a 6500mah 4s 60C that weighs about 520g
The big question is… Do you think that short flight time indicates I need to better tune the battery and associated failsafe levels, or do you think my rig is too fat and I need to figure out ways to pare it down? I’d like to hit 15 minutes if I can.
I know this is already a book so I wanted to stop there and see what comes from the community. I think I need someone with more experience to just tell me what direction I generally need to move in. Best case this is a tuning issue and I need to keep working the problem. Worst case I need to rethink my propulsion system. I appreciate any and all insight.
I just realized I didn’t answer your other question. I typed my initial post several times and didn’t remember to put that bit of info about total weight in there. It was just an eyelash over 2020grams with that giant battery in there.
I have a few 3s/5200mah batteries lying about that are a lot smaller and weigh at least somewhat less. What do you think about retuning for one of those and re-testing?
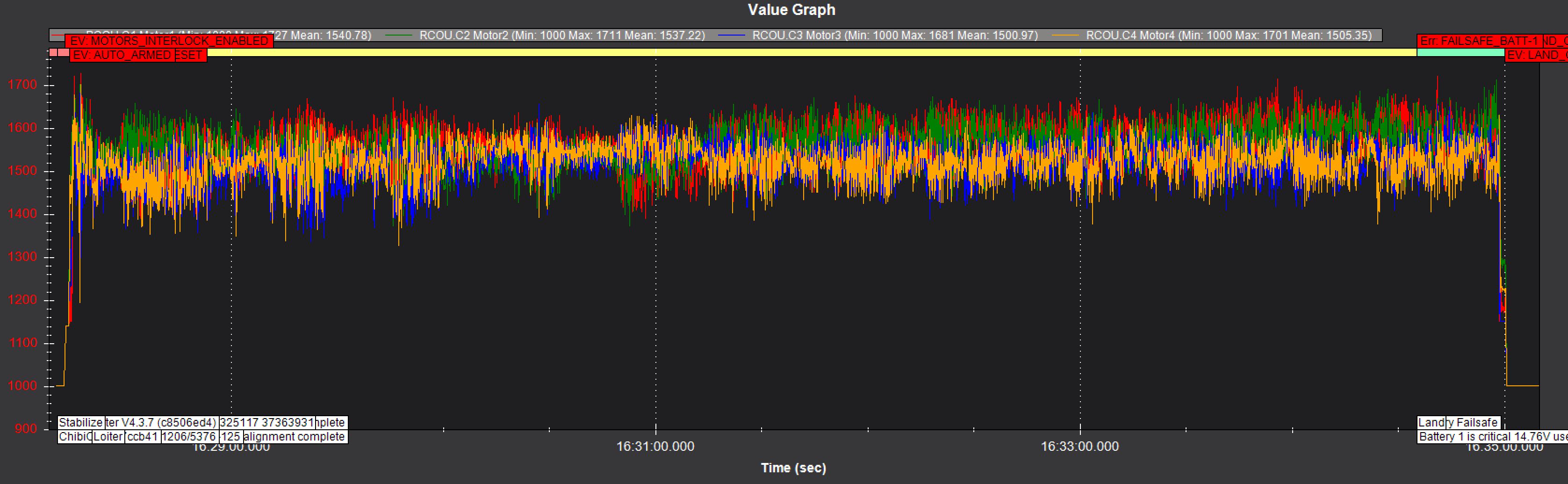
Actually the thrust/weight doesn’t look bad. 3 things we look at there is average RCout, Ctun>Tho and the learned MOT_THST_HOVER value. These are all in the ballpark. There is output oscillation that needs to be addressed:
It’s not terrible. Change these parameters:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
The Battery FS is set too conservatively IMO. I would set the Low Volt at 14.4V but opinions vary here.
A couple of the parameters above are to collect data for the Notch Filter which needs to be set. Make the changes and make another hover flight in AltHold.
I think I can get this done before it gets dark. I also made some other changes just for weight. I tossed the old cheap 200g gimbal and got rid of some of the original cables that came with the equipment. I double stick taped the gopro to the gimbal mount as a temporary thing. Overall I don’t think I would have changed center of gravity or anything too much, but without the battery I am sitting at roughly 1300 grams now. The 4S battery weighs more than I thought at 560g. The 5200 3s battery I have is 360g. Based on your comments I will stick with the 4s for now.
My advice is always use the calculated battery voltage levels and if you suspect an issue check your voltage sensor calibration, but never change the calculated battery voltage values!
See Initial Parameters calculator in MissionPlanner / Setup / Mandatory…
If current sensing is working and accurate, then you can set BATT_FS_VOLTSRC,1 for sag-compensated voltage.
The exception the these rules are Li Ion cells where some manufactures or cell sizes have some different ratings, but the calculated Li Ion values from the Initial Parameters calculator are safe. Only change the standard calculated values based on actual manufacturers data, or if you’ve done bench testing.
I certainly won’t argue with what you’re saying in any way. I will set these and read up on their effects so I understand better going forward.
It looks like what didn’t match this was the BATT_ARM_VOLT, which was set to 15.5, BATT_CRIT_VOLT, which was 14.4, and MOT_BAT_VOLT_MIN, which I had set at 14.
What I’d love to be able to trust is whether or not current sensing is working and accurate. I’ll have to go looking for how to even tell.
@dkemxr - Here’s a link to a fresh log after making the changes you suggested. I probably didn’t achieve as smooth a hold as I could have if I’d have pretended to have some patience, but it did run about 9.5 minutes, so that’s something, IMHO.
I suppose I need a new charger that gives me some of this information. Mine is a little white box that came with my 3DR Iris+ back in the day, lol. If you have suggestions as to the tools that will help me maintain these kinds of settings going forward I would appreciate them. Meanwhile on amazon.com…
OK, I should have also suggested you drop the Rate Pitch/Roll PID’s. It looks like you had increased them from default and they need to go the other way. Drop the P&I’s from 0.17 to 0.10 and the D terms back to default of .0035.
Set these too for the Notch Filter, although they may have to change after the above settings are made.
INS_HNTCH_ENABLE,1 (then refresh parameters)
INS_HNTCH_ATT,40
INS_HNTCH_BW,52
INS_HNTCH_FM_RAT,1
INS_HNTCH_FREQ,104
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.29
And you guessed it, another AltHold hover flight.
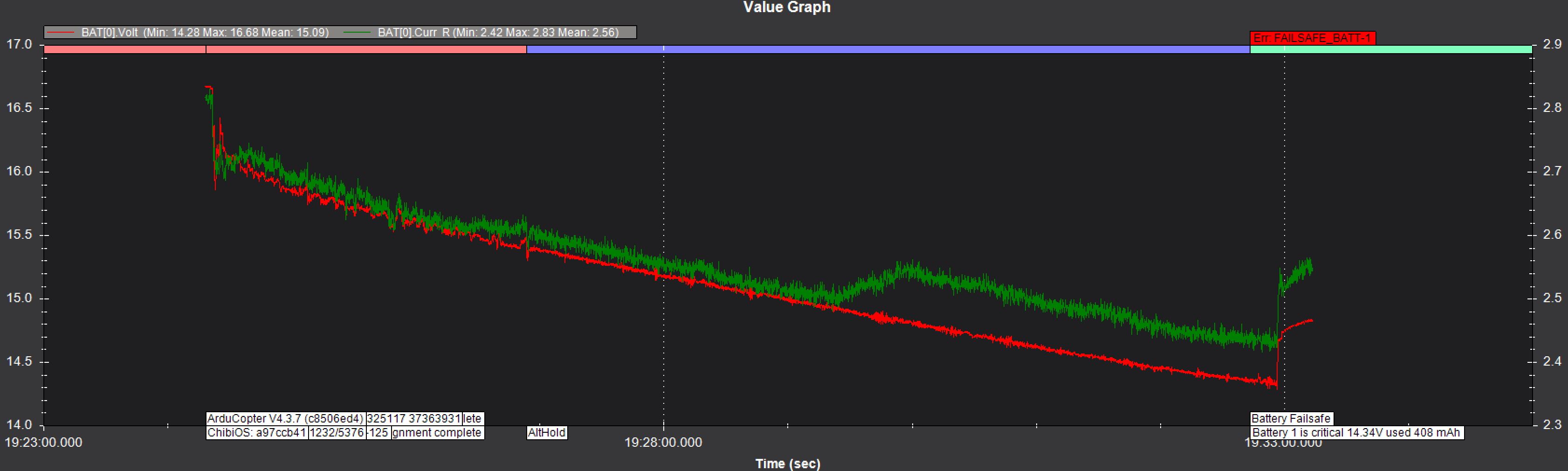
Also, your current logging is not right. You have something wrong there. This is not what a Vbat/Current graph should look like:
I will do another flight tomorrow morning and report back with a new logfile.
BTW, I realize now that I got these settings from the cubepilot.org documentation for the EDU-450, which are located here, if you are curious what all was in that…
I probably should have skipped that knowing how much has changed since 4.0.0.
Also, I wonder what I’m gonna do about that current logging issue. I really appreciate all the insight. I hope someday I can repay it somehow. Here I go on another exciting odyssey for that…
No big deal but I do wonder why that battery dies so quickly when you seemingly have sufficient thrust/weight. That’s a good amount of capacity with 4S for a 450 size craft.