It looks like the baro altitude spiked very positive so arducopter reduced the throttle to nothing to counter the incredible altitude change. I’m not certain about why that would happen in Stabilise mode, because although you reduce the throttle somewhat too, you didnt reduce it to zero.
The compass calibration could certainly do with some work, do an ordinary flight with plenty of turns, a figure 8 and a circle, then use magfit to analyse the log and provide new calibration values.
This will work best if you can first do the basic compass calibration with a good GPS 3D fix.
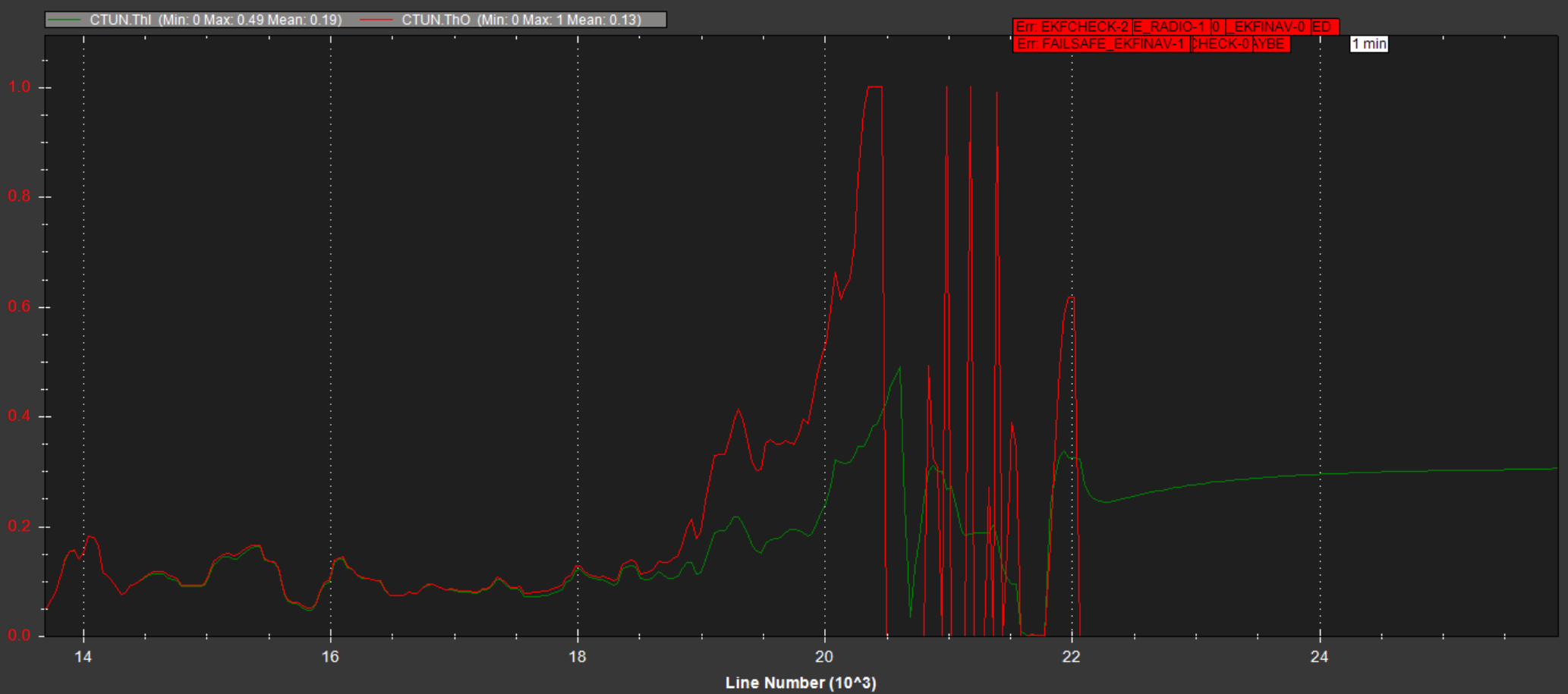
I think the altitude spike may be real and a result of high throttle outout. You can see this in ThO. It also looks like there is a large error in ThI vs ThO when I started throttling up. Reason for this is not clear to me.
Yes, which makes this look very strange. I couldnt see why arducopter would reduce motor outputs to zero, which (as far as I can tell) doesnt match throttle input.