Hi @Vincent_Randal, MOT_PWM_TYPE should be 0 (if use common RC ESC), RC_SPEED should be 490, could be higher.
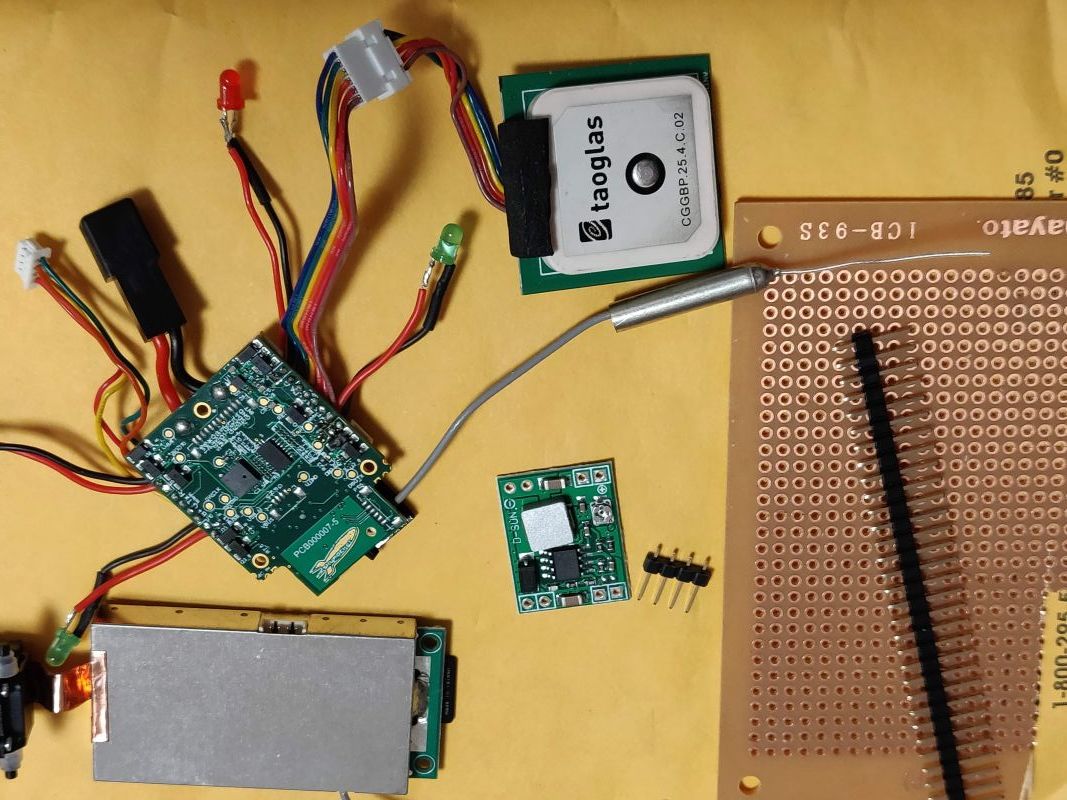
I have loaded Sky Viper controller on brushless quad. It is straight forward, I document quick memo here.
Used old 250 quad I have not flown for 3 years or so. Unbrekable but heavy like a brick. Uses 3S 1400mAh, flight time is 10 min or so. ESC firmware is Simonk. 5 inch prop.

This quad motor is for 3s battery, prepared cheap regulator. Gave up voltage monitoring.
I have not updated firmware to master. As is out of the box. Will use default toy TX. Can use Web interface parameter menu.
Solder wires to 4 FETS and ground.
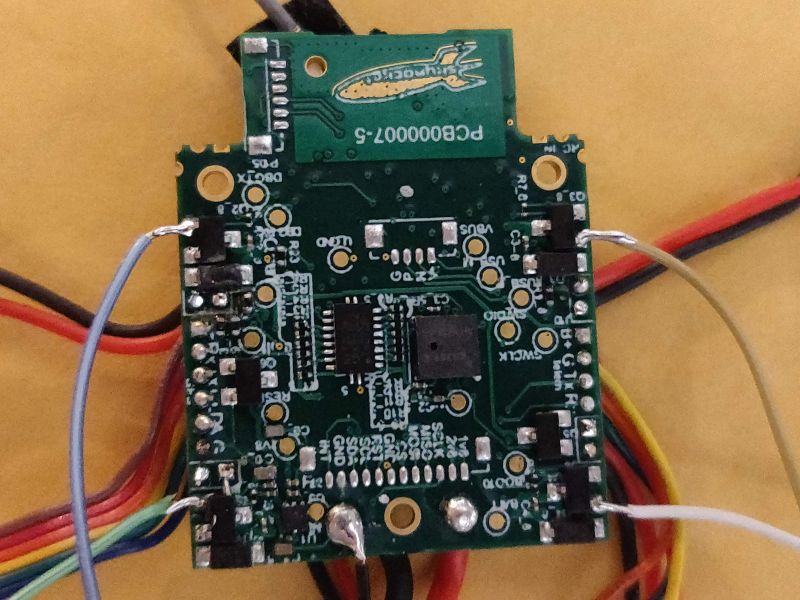
Wire to pin terminal for 4 ESCs.
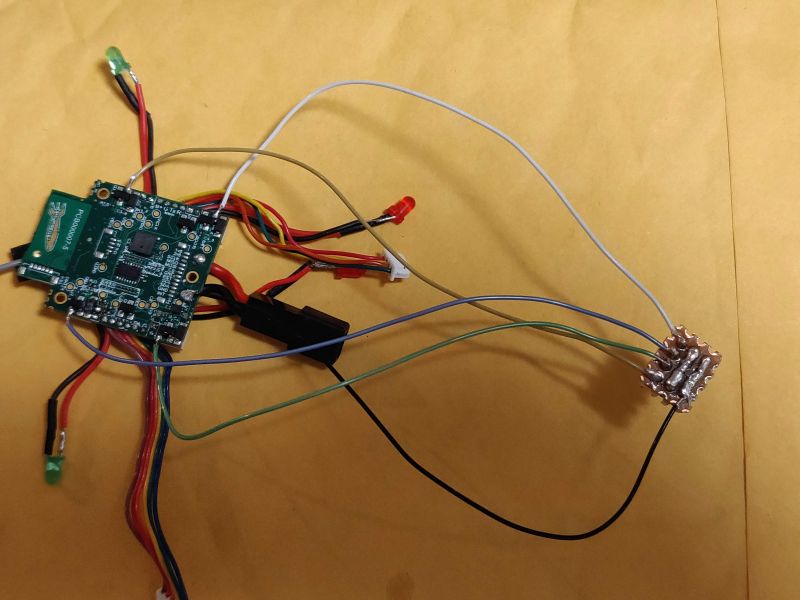
Fix flight board somehow, done. Weighs 310g without battery…

Calibrated 4 ESCs with servo tester, changed MOT_PWM_TYPE to 0, (have not changed RC_SPEED…) Verified it can arm and motor spins correctly on bench using Web interface and Mission Planner.
I needed to lower PID values as minimum as possible in Mission Planner. Once it can fly, I ran autotune. Attaching log file which was able to do short auto mission.
