Im using a homemade tricopter airframe with a pixhawk flight controller and mission planner, using a ps4 controller as my controller. I am trying to trim the motors for a stable takeoff, every time I try to takeoff as I increase thrust the aircraft rolls right. What parameters can I fix to correct this? I’ve tried changing the rc_trim values of the motors but this doesn’t seem to do anything.
Thank you
How did those suggestions work?
Don’t use RC_trim, that’s only going to compound the problem.
1 Like
We used ecalc and upscaled our props, it seems like thrust is no longer the problem but the imbalances seem a bit more pronounced, if we try and throttle up the drone will just jump up and flip over faster than with the smaller motors.
If RC_trim isn’t the correct parameter what is?
Post the .bin log file. Impossible to troubleshoot without data.
RC_TRIM establishes the neutral point of the stick. Basically, when the RC stick is in the trim position (or close to it based on the deadband parameter) then the FC knows you want 0 pitch or roll, or more aptly, you aren’t commanding the drone to do anything. The FC should be able to hover the drone without pilot input (drift is a different issue, but either way it shouldn’t be flipping over).
I will post the log file as soon as I can.
Based on what you are saying, if we have the RC stick in trim position and it is rolling right, wouldn’t we be able to reduce roll by changing the neutral point of the stick and therefore telling the FC we want some roll left (effectively counteracting the inherent roll right)?
If there’s an inherent right roll to the drone that needs constant correction, that needs to be fixed. Most likely a mechanical issue (motor/thrust imbalance, C of G, part failure, calibration, etc) Again, I’m not talking about drift. I don’t think were at that point yet. If the drone wants to roll over and you need to constantly correct for it something isn’t setup correctly. The FC should manage that. This is isn’t like a non-FlightControlled RC plane that you trim out.
Maybe include an image of how the flight controller is installed relative to the fuselage.
Here is the flight log from one of our last tests (we were trying a lot of things and at this point I think all of our PIDs are around 0). I don’t believe we ever left the ground, we just throttled up slowly until it rolled to the right.
The FC is mounted flat in our fuselage, I think I am going to trying shifting the motors on one side of the airframe inward slightly and see how this affects the behavior.
The file is locked. Can’t download.
sorry about that, it should work now:
How have you got the motors wired in? I saw in the earlier photos you posted on one of the threads there are two on each wing, and one on the tail. So 5 all together. Basically, where is motor 1, where is motor 2, etc.
I didn’t do the motor wiring but I believe this is how it works: so the two on each side of the wing are wired as one motor each, I believe motor one is the right pair and motor two is the left pair. And then there’s the motor on the tail obviously. We did this so that we could use the tricopter configuration while still using four front motors to reduce the thrust load on each.
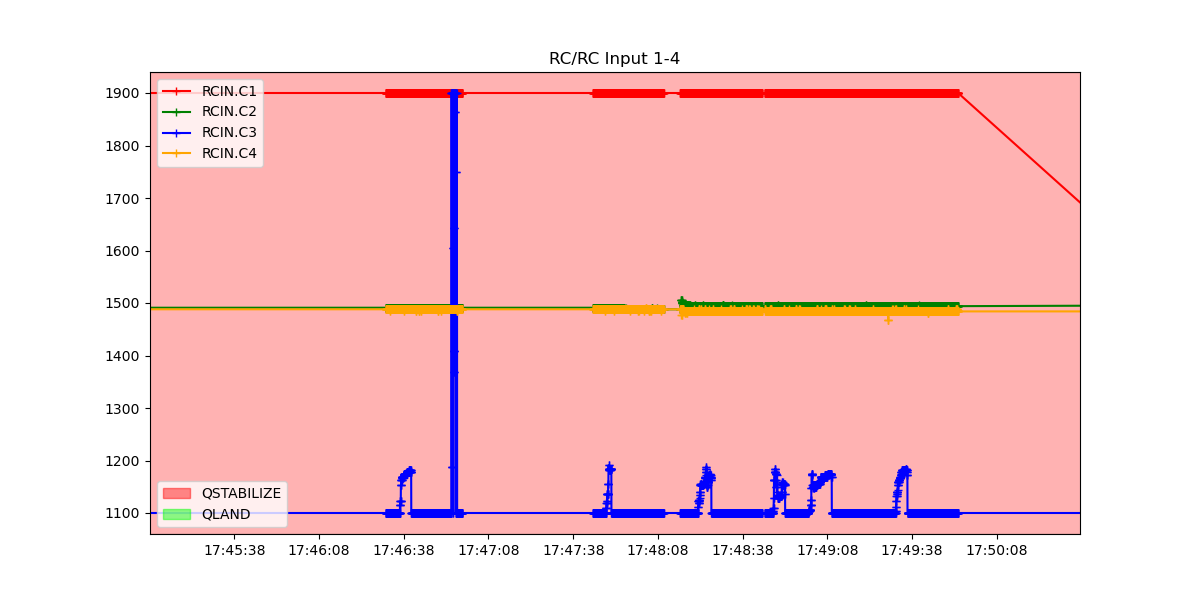
The RC 1 input (roll) is at max deflection. That needs to be zeroed. Either the radio trim or something set in the radio.
Wiring motors in pairs works for fixedwing, but in VTOL mode, I don’t know that will work. The thrust would have to be perfectly balanced and that’s harder than it sounds. Try this just to see if it helps: take off the two inboard props (or outboard, your call) and see what happens. Might not fly, but see if the roll issue is still there.
I’ll try those and let you know, would the radio trim not be RC trim? is there a separate parameter for trimming the radio? Thank you
We took off the inboard props first and it was still roll unstable, although slightly less so, but it rolled to the left instead of the right. Then we tried taking off the outboard props and it was much more roll unstable and this time to the right again. We also tried moving the right side motor outward more while we only had the inboard props on and it became much more roll stable although still not perfect and it rolled to the left. To me this seems like it would indicate a mechanical issue but my partners still aren’t sure.
I would tend to agree. It sounds like a mechanical issue to me too.
That would be in the radio itself. Exactly how depends on the radio you’re using.
Here is the flight log from this last test, we seem to have isolated the motor which we suspect is causing the issue and it seems like whichever side of the wing we place it on is the side that it rolls away from. So for next test we are going to try and switch out this motor.
We also moved the FC within the airframe a couple times and this made no difference. Additionally moving the motors laterally made very little difference which causes me to think it is not a CG or FC positioning problem.
I really appreciate all your help with this.