Hi there.
I create a new drone but I have some issues. How can I fix the PID values. Can anyone help us about these pictures?
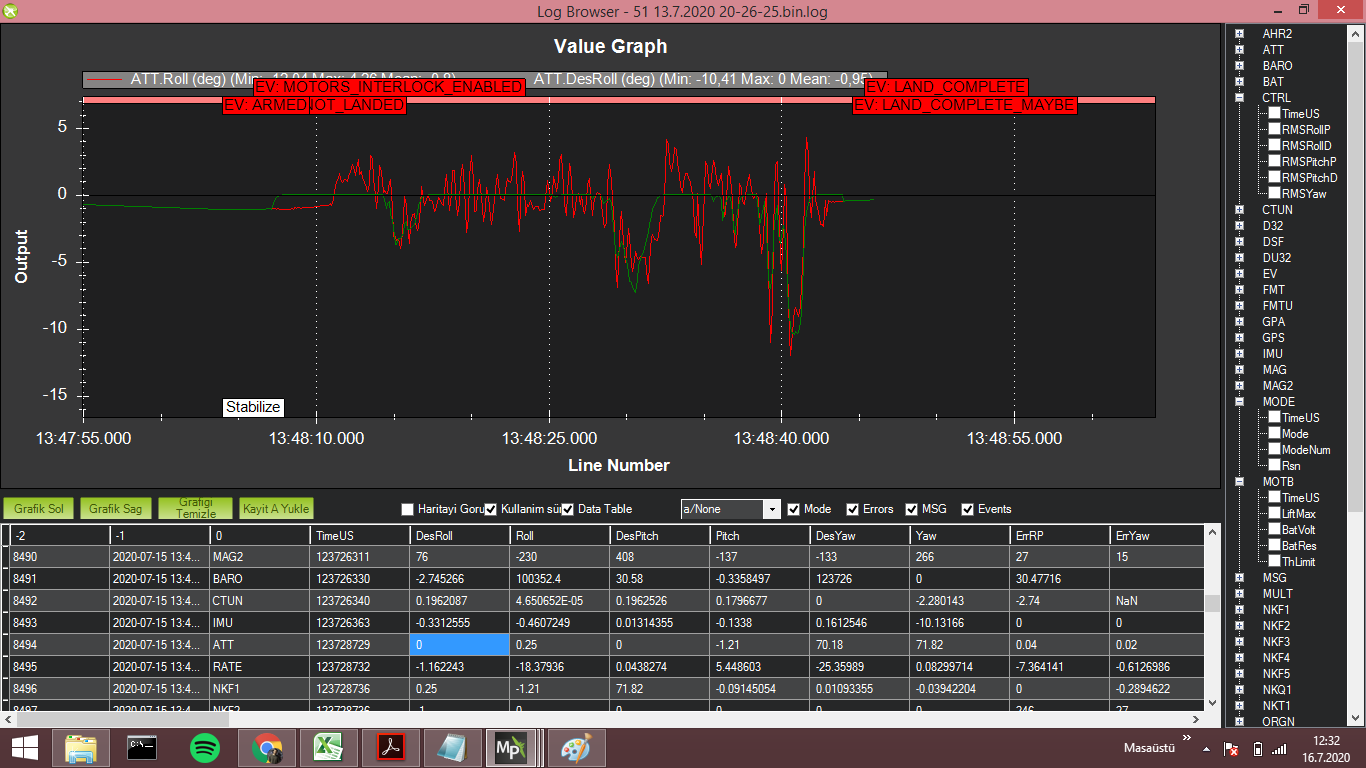

Thx Eosbandi. As I said I am new and now DRONE SHAKES ON PITCH AND ROLL CROSS AXIS. Here is video: https://drive.google.com/file/d/1TqnuJ3AGdtwAokVsmZTfa2TE_XMuZzAB/view?usp=sharing What should I do?
by the way this usually happens when drone in position hold and loiter mode.