Hi all.
I have two airframes (classic, simmetric quads, one 4kgs and another 8kgs AUW) which i’m tuning with a PixHawk 2.1 “the cube”.
All flights done in “Stabilized” flight mode
First, good news: the smaller one (4kg) has been straightforward. A couple of batteries which took me to raise P and D from defaults (3.5.7 stable) to about 0.18 and 0.076 respectively. Took it to extreme manouvers at max angle, no problem.
Then the bigger one: it’s taking me crazy. Same setup (pixhawk 2.1, etc), i had a brief maiden flight with defaults, just to be aware they had to be raised, then put P at 0.2. Then problems began: he wants to pitch BACK to me after take off (in Stabilized) more and more until i cannot compensate with pitch up anymore.
Everything happens in seconds after take off. MP console shows EKF errors exploding.
In one attemp, it switched back to DCM in flight, after i released pitch a bit and it went back by itself, and after switching to DCM it began to fly “correctly” (straight, with normal correction inputs), but showing an error status (various color blinking led) and red EKF on the console. I landed immediately.
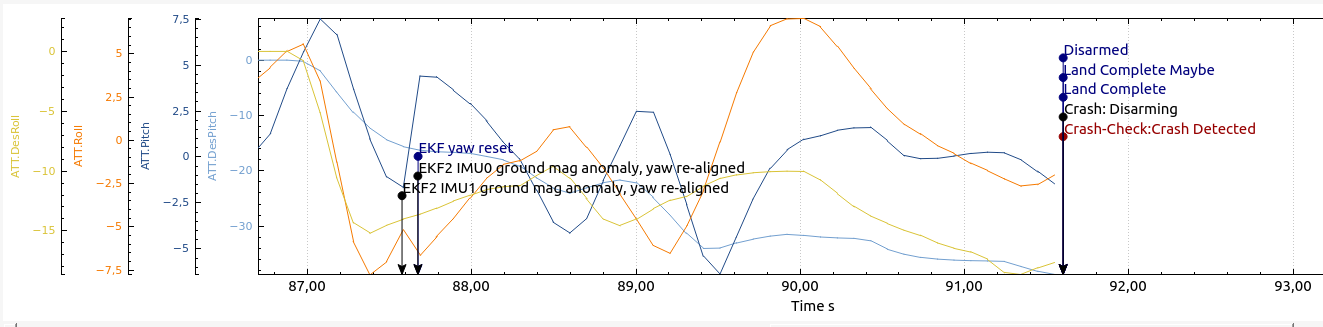
Then, In another attemp, same situation, the pitch back situation just after take off (which i was compensating manually with opposite pitch input) has gone to TURNING OFF MOTORS midflight and a crash detection after seconds! Luckly i was low and had minor damages.
Now i’m very puzzled. I will try to put a thick sticky foam to prevent vibration problems, but i don’t think it’s the cause. I don’t know what to do next.
PS: swapped FC with another one, brand new. Had the exact same situation.
Tried also 3.6-DEV, it acted same, i went back to 3.5.7 stable.
logs of last flight with final crash:
https://drive.google.com/file/d/1UgY4GrZThQHcwGf2Nn_hS5X4-RkKavxo/view?usp=sharing
EDIT: FIXED! See the last post


 but i’ve earned a lot of experience on tuning and finding out HW problems. Thanks to whom helped here.
but i’ve earned a lot of experience on tuning and finding out HW problems. Thanks to whom helped here.