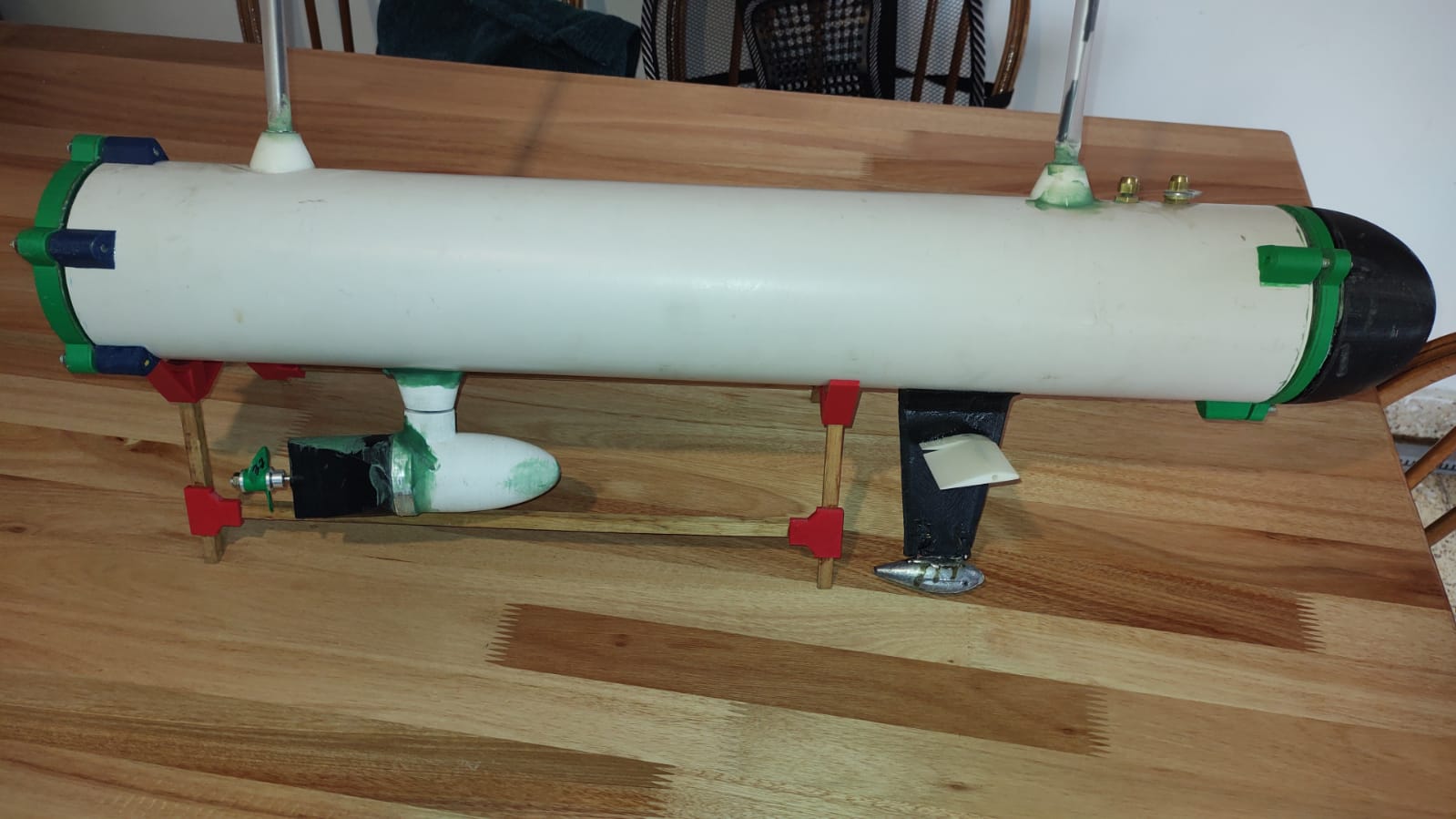
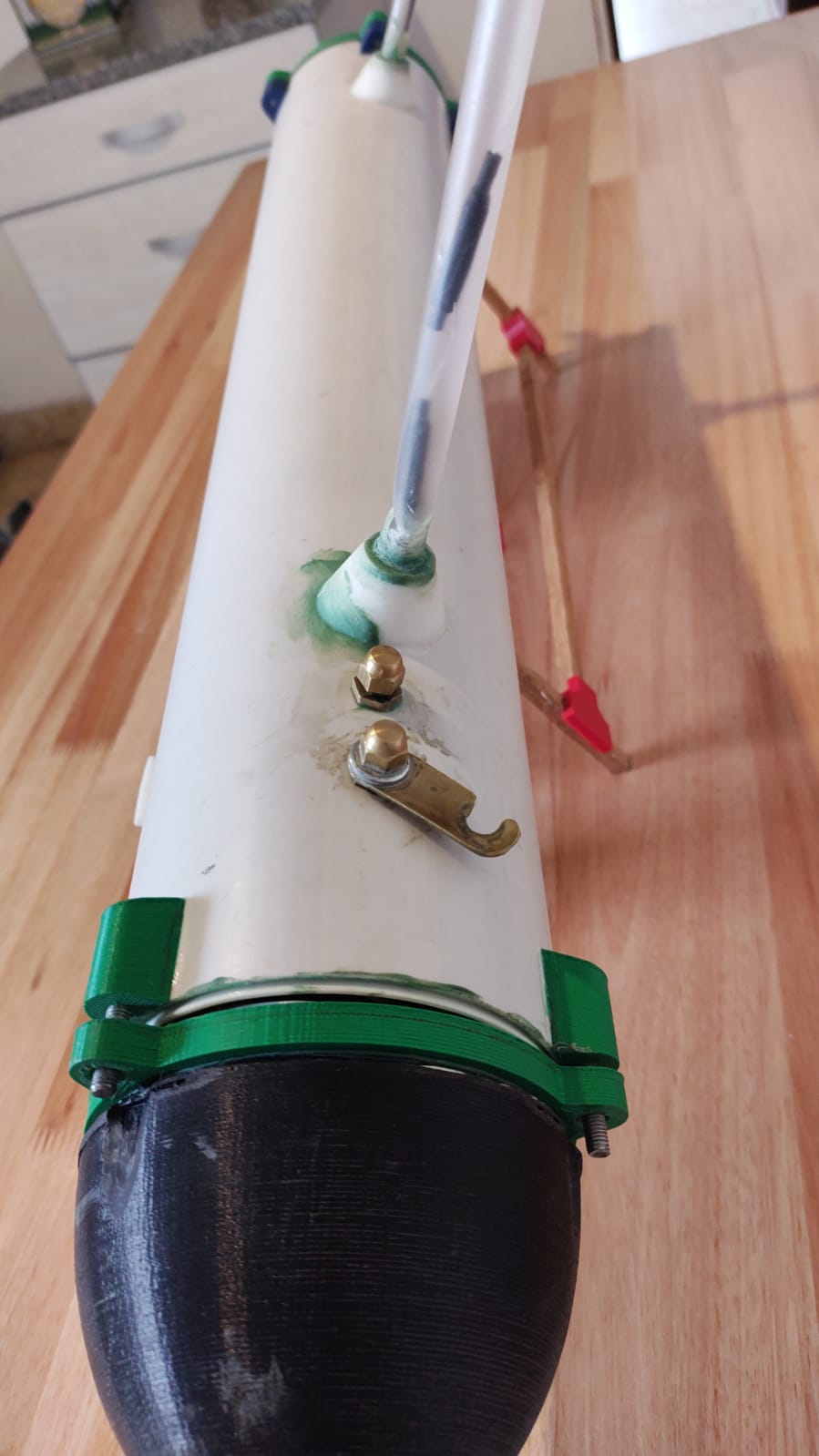
Yesterday we calibrate and cruise my friend Martin Lere’s fishing boat.
This particular boat, is piloted by a Kakute F7 1.5 made with a tube and 3d print parts
It has a presurization system Lere’s designed, with a Little pump inside commanded by an Arduino and a barometer, that start and stop at desired pressure, that not allow to enter water inside and keep electronic dry and protected, with a little valve on top of antenna pipe
Navigation was nice, in auto and guided mode
the only problem is that kakute baro give ERR in mission planner because pressure changes,
Any ideas how to remove that issue?
and how to control pressure directly with the kakute baro?
Hi,
whilst I can not answer your question I just wanted to say I like your project.
I used to use RC submarines but no longer do as I don’t have access to a suitable lake.
The one little advise I can provide is the importants of a safety device within which lets you know if water has entered. (Soemthing like this works fine: https://www.ebay.com.au/itm/163854581083?hash=item26267e7d5b:g:xq8AAOSwZIlddmnc&frcectupt=true)
I lost some submarines over the years and found no matter how well you seal it and how many checks you carry out sooner or later there is a problem (I.e. your pump may fail or getting blocked whilst having a problem with a seal) and a leak can occur. I used to have an override on the dive servo if water was detected within the haul it would prevent submarine from diving. In your case, at it is not a submarine, a simple siren or buzzer may proof sufficient.
…just a friendly and helpful thought.
Thank´s Karl for share your experience, sub looks much more difficult than boat.
The idea is that the pump start from atmosferic pressure + 20 mbares and stop at +25 mbares with the arduino, when the pressure return to +20, start again so water cant go inside in case of little filtrations for pressure different, we can check if the system is working well checking kakute baro by the telemetry, the issue is that Mission planner show baro ERR continuously, perhaps that ERR can be removed in a rover because it no have sense barometric variations in a rover? @rmackay9
This is the pump
Certainly understand the concept of positive pressure keeping the water out. But was just thinking of extra safety step in case there is a problem with pump or intake valve.
In regards to the baro error I’m surprised the parameter even exists in the rover version. In the copter version there is a parameter “Ek2_ALT_Source” you can find in MP or using QGroundcontrol - whichever you prefer. Whilst that setting can’t be turned off you could try changing it to GPS or any other sensor just to see if that stops the message. Another possibility is in the failsafe settings it may be activated by standard and you just need to disable it.
There is also a " BRD_ALT_CONFIG" setting but apparently the options there depend on the control board being used. https://ardupilot.org/copter/docs/parameters-Copter-stable-V4.0.7.html#brd-alt-config-alternative-hw-config
In regards to using the kakute baro to control pressure - I’ve got no idea. Some other control boards can communicate with the arduino board you’ve mentioned and with a small script the data could be read and the pump triggered when required. On that board I have no idea. - Sorry.
I personally am much more inclined to search for a simple pressure switch (barometric switch) in order to control the pump. Much more reliable than a mini computer, software and everything else that would go with that.
…half an hour later:
Have given your project more thought…
The reasons for having a barometric sensor reading in ardurover are most likely:
a) As most control boards have an inbuilt sensor for air pressure, why not use it?
b) If you decide to sent a rover up a steep hill you may want to know how high it is / has been.
this brings me to the problem with the error message you’re getting. I suspect what is happening:
a) the pressure you create with your pump is higher than what the sensor is designed to handle or the values received are higher than expected by the board.
b) The pump you’ve shown in the photo appears to be a small diaphragm or piston air pump. Those kind of pumps don’t create a steady flow of air like a fan would, but rather provide airflow in pulses. If the barometric sensor is sensible enough it will pick up on those airflow pulses and hence creates a error state as such a thing would never happen in an aircraft.
So, if my assumption is correct you can’t use that sensor for for controlling the pump.
Nice boat! The steering mechanism is interesting. I guess it turns the whole motor with a servo?
I agree with the advice from others to try changing the EKF’s altitude source to see if that helps. 4.1 has just been released which uses EKF3 by default so the parameter becomes EK3_SRC1_POSZ.
Re why do we have a baro in Rover, I think @Karl_Schoelpple has the reasons listed correctly. I guess the difference comes from the separation of “control” and “estimation”. Even though the vehicle is not able to control its height it may still want to know it for some reason. For example object avoidance works in 3D… so if the vehicle somehow found that it was above an obstacle (e.g. highway overpass?) it would know that it was safe to drive "over’ it.
Thanks Karl for all your help an thinking in my proyect , is the first time we made something that not have to fly but now the challenge is the water lol. We discuss with Lere that the first safety step that we need here is not to enter water, not have the pump need working very often and so less ERR, the first attempt had many little filtrations so we are building the V2 boat with many things learned with the first experience and thinking in an extra water alarm.
Nice, we upload the new release and change the EK3 param to see what happens (I report then)
Thank’s both to let me know the use of baro in rovers, my next proyect is a terrain rover and is going to be usefull, I still need to learn a lot about rovers, its looks fascinating .
Like that you making it all yourself. - Good effort.
Years ago and without any 3D printers I bought this commercial version. Unfortunately never got around actually using it.






 , is the first time we made something that not have to fly but now the challenge is the water lol. We discuss with Lere that the first safety step that we need here is not to enter water, not have the pump need working very often and so less ERR, the first attempt had many little filtrations so we are building the V2 boat with many things learned with the first experience and thinking in an extra water alarm.
, is the first time we made something that not have to fly but now the challenge is the water lol. We discuss with Lere that the first safety step that we need here is not to enter water, not have the pump need working very often and so less ERR, the first attempt had many little filtrations so we are building the V2 boat with many things learned with the first experience and thinking in an extra water alarm.





